 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Resilience and Sensitivity of Polyurethane-Based Vision-Based Tactile Sensors
Nov 11, 2025Vision-based tactile sensors (VBTSs) are a promising technology for robots, providing them with dense signals that can be translated into an understanding of normal and shear load, contact region, texture classification, and more. However, existing VBTS tactile surfaces make use of silicone gels, which provide high sensitivity but easily deteriorate from loading and surface wear. We propose that polyurethane rubber, used for high-load applications like shoe soles, rubber wheels, and industrial gaskets, may provide improved physical gel resilience, potentially at the cost of sensitivity. To compare the resilience and sensitivity of silicone and polyurethane VBTS gels, we propose a series of standard evaluation benchmarking protocols. Our resilience tests assess sensor durability across normal loading, shear loading, and abrasion. For sensitivity, we introduce model-free assessments of force and spatial sensitivity to directly measure the physical capabilities of each gel without effects introduced from data and model quality. Finally, we include a bottle cap loosening and tightening demonstration as an example where polyurethane gels provide an advantage over their silicone counterparts.
Nonlinear Parameter-Varying Modeling for Soft Pneumatic Actuators and Data-Driven Parameter Estimation
Nov 04, 2023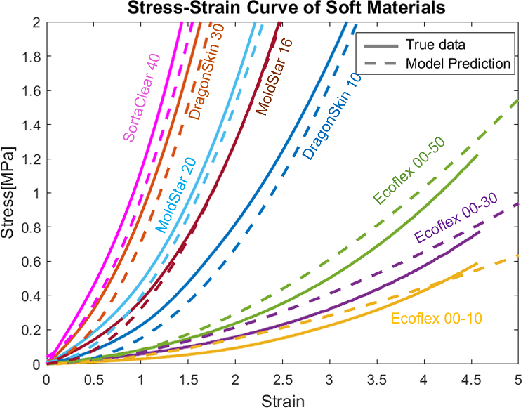
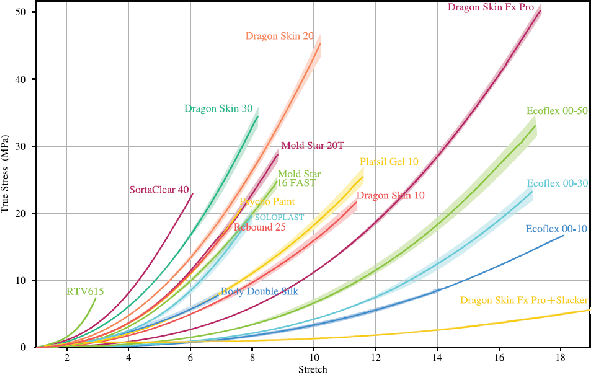
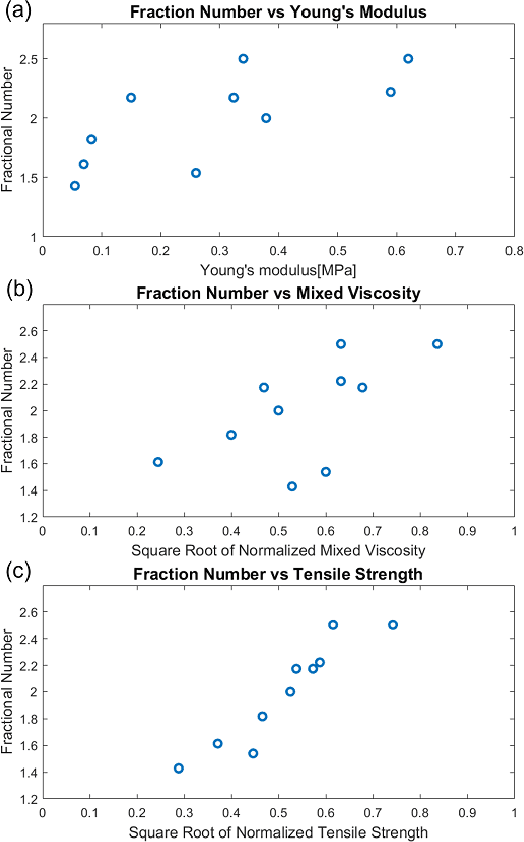
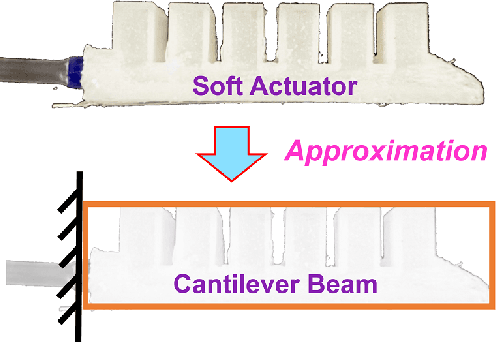
Accurately modeling soft robots remains a challenge due to their inherent nonlinear behavior and parameter variations. This paper presents a novel approach to modeling soft pneumatic actuators using a nonlinear parameter-varying framework. The research begins by introducing Ludwick's Law, providing a more accurate representation of the complex mechanical behavior exhibited by soft materials. Three key material properties, namely Young's modulus, tensile stress, and mixed viscosity, are utilized to estimate the parameter inside the nonlinear model using the least squares method. Subsequently, a nonlinear dynamic model for soft actuators is constructed by applying Ludwick's Law. To validate the accuracy and effectiveness of the proposed method, experimental validations are performed. We perform several experiments, demonstrating the model's capabilities in predicting the dynamical behavior of soft pneumatic actuators. In conclusion, this work contributes to the advancement of soft pneumatic actuator modeling that represents their nonlinear behavior.