 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrequency Domain Analysis of Nonlinear Series Elastic Actuator via Describing Function
Oct 05, 2023



Nonlinear stiffness SEAs (NSEAs) inspired by biological muscles offer promise in achieving adaptable stiffness for assistive robots. While assistive robots are often designed and compared based on torque capability and control bandwidth, NSEAs have not been systematically designed in the frequency domain due to their nonlinearity. The describing function, an analytical concept for nonlinear systems, offers a means to understand their behavior in the frequency domain. This paper introduces a frequency domain analysis of nonlinear series elastic actuators using the describing function method. This framework aims to equip researchers and engineers with tools for improved design and control in assistive robotics.
Control of Soft Pneumatic Actuators with Approximated Dynamical Modeling
Oct 03, 2023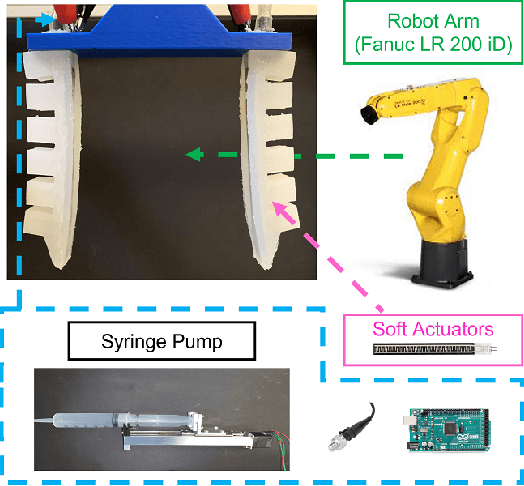
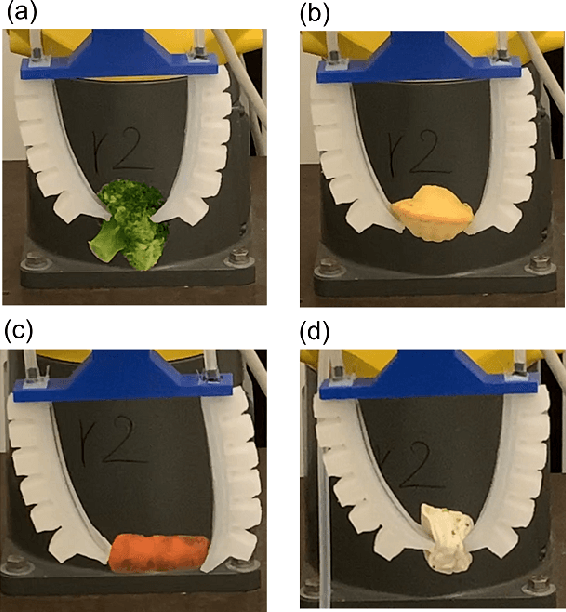
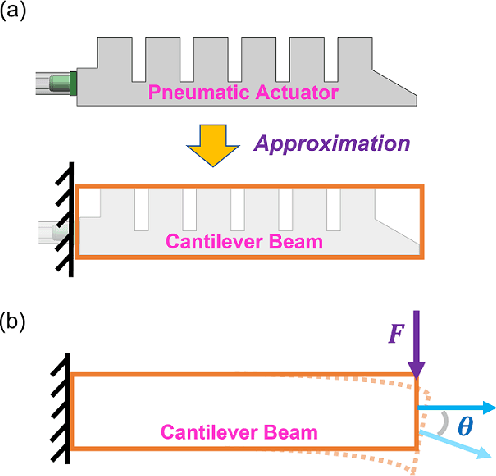
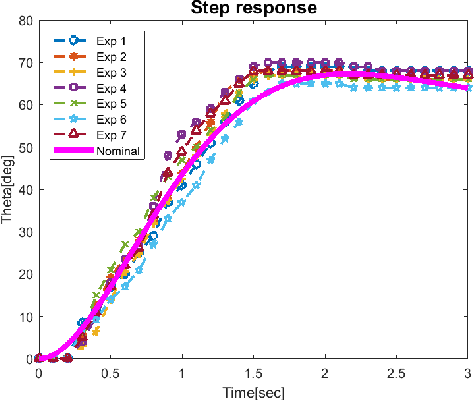
This paper introduces a full system modeling strategy for a syringe pump and soft pneumatic actuators(SPAs). The soft actuator is conceptualized as a beam structure, utilizing a second-order bending model. The equation of natural frequency is derived from Euler's bending theory, while the damping ratio is estimated by fitting step responses of soft pneumatic actuators. Evaluation of model uncertainty underscores the robustness of our modeling methodology. To validate our approach, we deploy it across four prototypes varying in dimensional parameters. Furthermore, a syringe pump is designed to drive the actuator, and a pressure model is proposed to construct a full system model. By employing this full system model, the Linear-Quadratic Regulator (LQR) controller is implemented to control the soft actuator, achieving high-speed responses and high accuracy in both step response and square wave function response tests. Both the modeling method and the LQR controller are thoroughly evaluated through experiments. Lastly, a gripper, consisting of two actuators with a feedback controller, demonstrates stable grasping of delicate objects with a significantly higher success rate.