 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Ambient Intelligence: Federated Edge Learning with Task-Oriented Sensing, Computation, and Communication Integration
Jun 13, 2022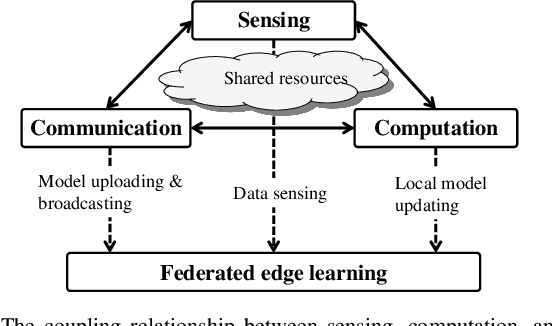
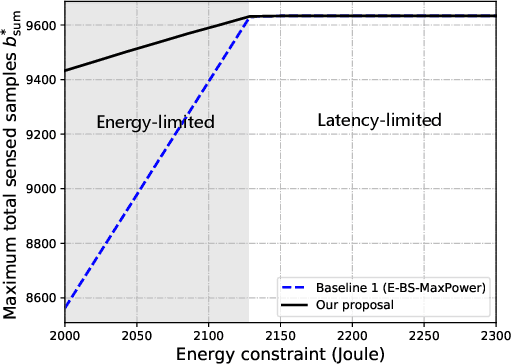
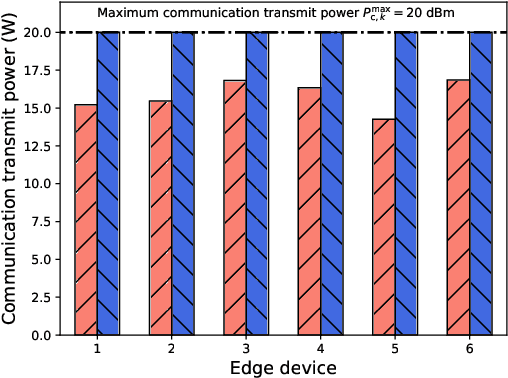
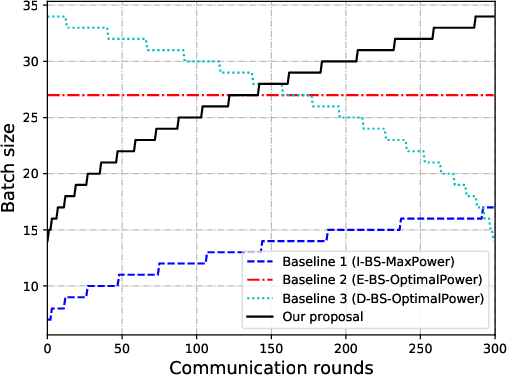
In this paper, we address the problem of joint sensing, computation, and communication (SC$^{2}$) resource allocation for federated edge learning (FEEL) via a concrete case study of human motion recognition based on wireless sensing in ambient intelligence. First, by analyzing the wireless sensing process in human motion recognition, we find that there exists a thresholding value for the sensing transmit power, exceeding which yields sensing data samples with approximately the same satisfactory quality. Then, the joint SC$^{2}$ resource allocation problem is cast to maximize the convergence speed of FEEL, under the constraints on training time, energy supply, and sensing quality of each edge device. Solving this problem entails solving two subproblems in order: the first one reduces to determine the joint sensing and communication resource allocation that maximizes the total number of samples that can be sensed during the entire training process; the second one concerns the partition of the attained total number of sensed samples over all the communication rounds to determine the batch size at each round for convergence speed maximization. The first subproblem on joint sensing and communication resource allocation is converted to a single-variable optimization problem by exploiting the derived relation between different control variables (resources), which thus allows an efficient solution via one-dimensional grid search. For the second subproblem, it is found that the number of samples to be sensed (or batch size) at each round is a decreasing function of the loss function value attained at the round. Based on this relationship, the approximate optimal batch size at each communication round is derived in closed-form as a function of the round index. Finally, extensive simulation results are provided to validate the superiority of the proposed joint SC$^{2}$ resource allocation scheme.
Hybrid Offline-Online Design for Reconfigurable Intelligent Surface Aided UAV Communication
May 27, 2022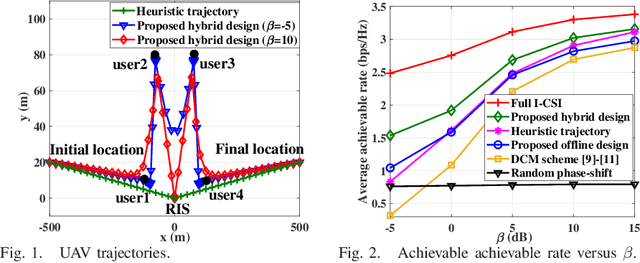
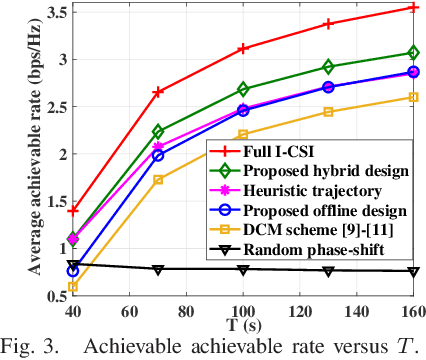
This letter considers the reconfigurable intelligent surface (RIS)-aided unmanned aerial vehicle (UAV) communication systems in urban areas under the general Rician fading channel. A hybrid offline-online design is proposed to improve the system performance by leveraging both the statistical channel state information (S-CSI) and instantaneous channel state information (I-CSI). For the offline phase, we aim to maximize the expected average achievable rate based on the S-CSI by jointly optimizing the RIS's phase-shift and UAV trajectory. The formulated stochastic optimization problem is difficult to solve due to its non-convexity. To tackle this problem, we propose an efficient algorithm by leveraging the stochastic successive convex approximation (SSCA) techniques. For the online phase, the UAV adaptively adjusts the transmit beamforming and user scheduling according to the effective I-CSI. Numerical results verify that the proposed hybrid design performs better than various bechmark schemes, and also demonstrate a favorable trade-off between system performance and CSI overhead.
Vertical Federated Edge Learning with Distributed Integrated Sensing and Communication
Jan 21, 2022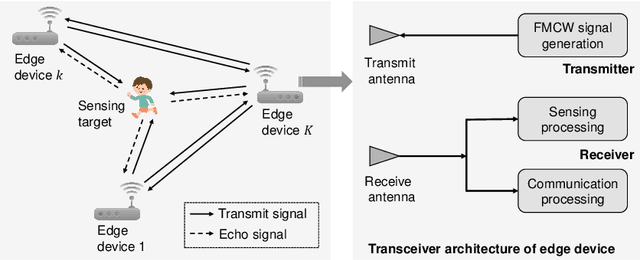
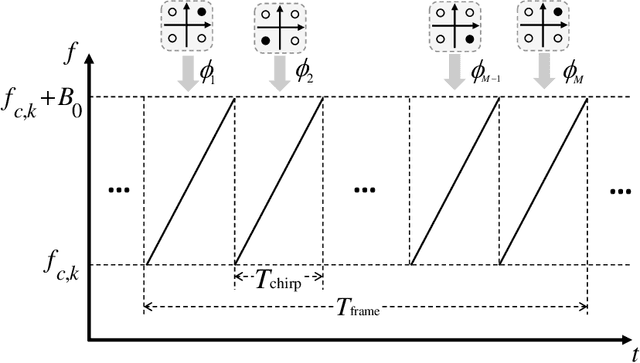
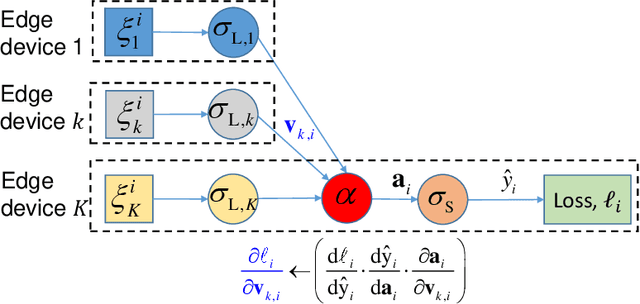
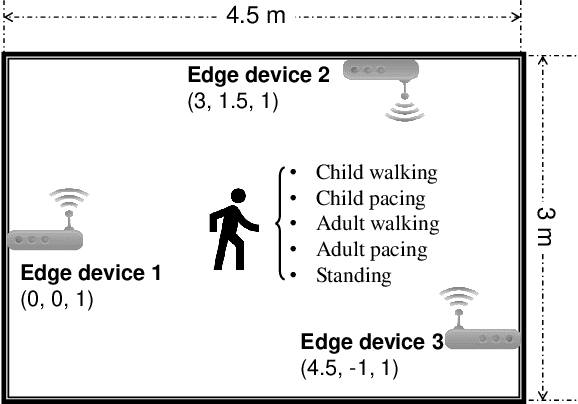
This letter studies a vertical federated edge learning (FEEL) system for collaborative objects/human motion recognition by exploiting the distributed integrated sensing and communication (ISAC). In this system, distributed edge devices first send wireless signals to sense targeted objects/human, and then exchange intermediate computed vectors (instead of raw sensing data) for collaborative recognition while preserving data privacy. To boost the spectrum and hardware utilization efficiency for FEEL, we exploit ISAC for both target sensing and data exchange, by employing dedicated frequency-modulated continuous-wave (FMCW) signals at each edge device. Under this setup, we propose a vertical FEEL framework for realizing the recognition based on the collected multi-view wireless sensing data. In this framework, each edge device owns an individual local L-model to transform its sensing data into an intermediate vector with relatively low dimensions, which is then transmitted to a coordinating edge device for final output via a common downstream S-model. By considering a human motion recognition task, experimental results show that our vertical FEEL based approach achieves recognition accuracy up to 98\% with an improvement up to 8\% compared to the benchmarks, including on-device training and horizontal FEEL.
Successive Convex Approximation Based Off-Policy Optimization for Constrained Reinforcement Learning
May 26, 2021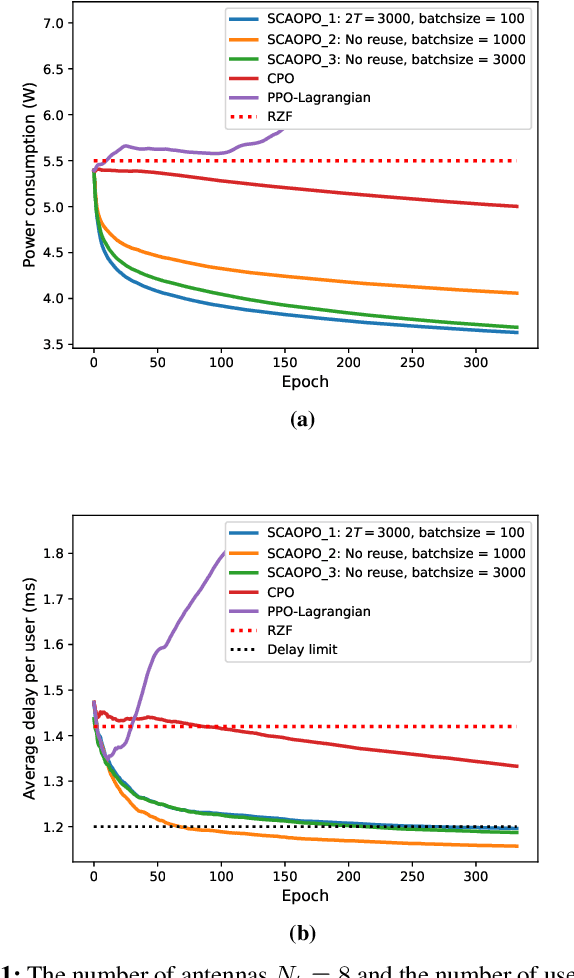
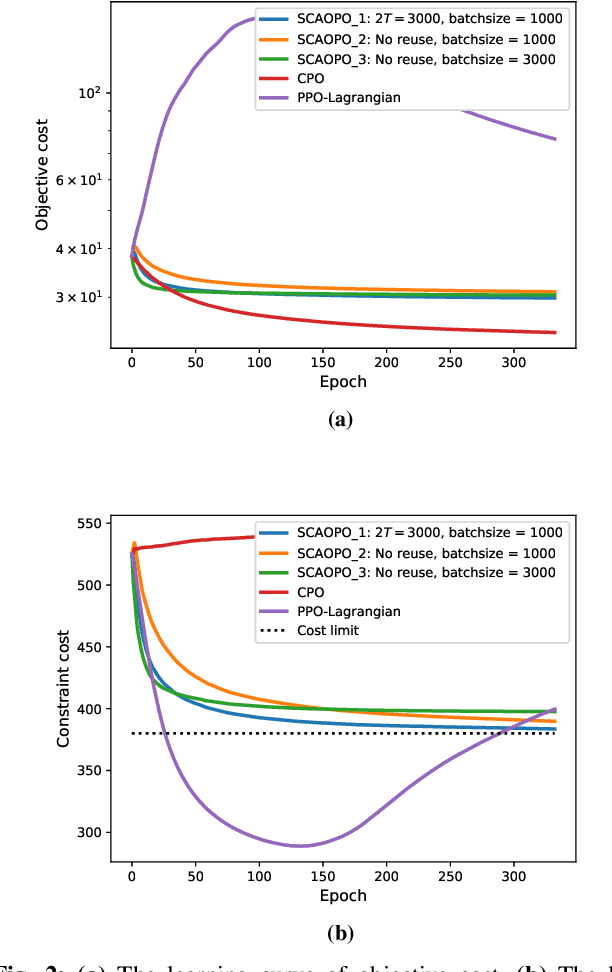
We propose a successive convex approximation based off-policy optimization (SCAOPO) algorithm to solve the general constrained reinforcement learning problem, which is formulated as a constrained Markov decision process (CMDP) in the context of average cost. The SCAOPO is based on solving a sequence of convex objective/feasibility optimization problems obtained by replacing the objective and constraint functions in the original problems with convex surrogate functions. At each iteration, the convex surrogate problem can be efficiently solved by Lagrange dual method even the policy is parameterized by a high-dimensional function. Moreover, the SCAOPO enables to reuse old experiences from previous updates, thereby significantly reducing the implementation cost when deployed in the real-world engineering systems that need to online learn the environment. In spite of the time-varying state distribution and the stochastic bias incurred by the off-policy learning, the SCAOPO with a feasible initial point can still provably converge to a Karush-Kuhn-Tucker (KKT) point of the original problem almost surely.