 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA GPU-accelerated Large-scale Simulator for Transportation System Optimization Benchmarking
Jun 15, 2024With the development of artificial intelligence techniques, transportation system optimization is evolving from traditional methods relying on expert experience to simulation and learning-based decision optimization methods. Learning-based optimization methods require extensive interaction with highly realistic microscopic traffic simulators for optimization. However, existing microscopic traffic simulators are computationally inefficient in large-scale scenarios and therefore significantly reduce the efficiency of the data sampling process of optimization algorithms. In addition, the optimization scenarios supported by existing simulators are limited, mainly focusing on the traffic signal control. To address these challenges and limitations, we propose the first open-source GPU-accelerated large-scale microscopic simulator for transportation system simulation. The simulator is able to iterate at 84.09Hz, which achieves 88.92 times computational acceleration in the large-scale scenario with more than a million vehicles compared to the best baseline. Based on the simulator, we implement a set of microscopic and macroscopic controllable objects and metrics to support most typical transportation system optimization scenarios. These controllable objects and metrics are all provided by Python API for ease of use. We choose five important and representative transportation system optimization scenarios and benchmark classical rule-based algorithms, reinforcement learning, and black-box optimization in four cities. The codes are available at \url{https://github.com/tsinghua-fib-lab/moss-benchmark} with the MIT License.
CityLight: A Universal Model Towards Real-world City-scale Traffic Signal Control Coordination
Jun 04, 2024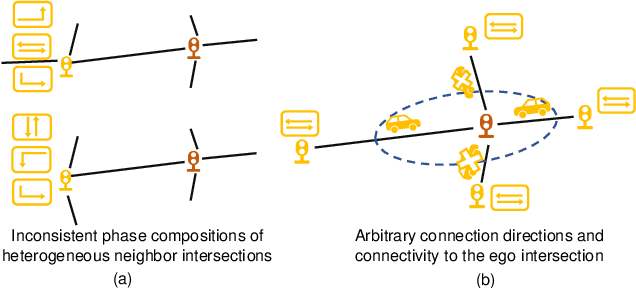
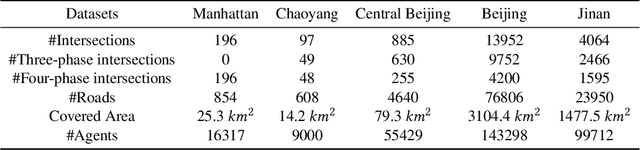
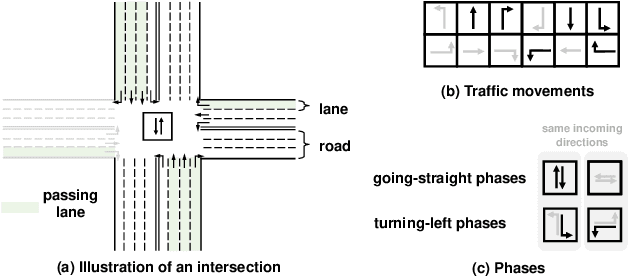
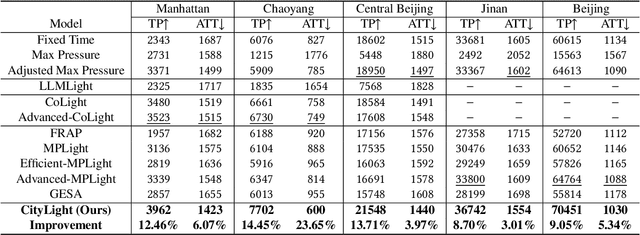
Traffic signal control (TSC) is a promising low-cost measure to enhance transportation efficiency without affecting existing road infrastructure. While various reinforcement learning-based TSC methods have been proposed and experimentally outperform conventional rule-based methods, none of them has been deployed in the real world. An essential gap lies in the oversimplification of the scenarios in terms of intersection heterogeneity and road network intricacy. To make TSC applicable in urban traffic management, we target TSC coordination in city-scale high-authenticity road networks, aiming to solve the three unique and important challenges: city-level scalability, heterogeneity of real-world intersections, and effective coordination among intricate neighbor connections. Since optimizing multiple agents in a parameter-sharing paradigm can boost the training efficiency and help achieve scalability, we propose our method, CityLight, based on the well-acknowledged optimization framework, parameter-sharing MAPPO. To ensure the unified policy network can learn to fit large-scale heterogeneous intersections and tackle the intricate between-neighbor coordination, CityLight proposes a universal representation module that consists of two key designs: heterogeneous intersection alignment and neighborhood impact alignment for coordination. To further boost coordination, CityLight adopts neighborhood-integrated rewards to transition from achieving local optimal to global optimal. Extensive experiments on datasets with hundreds to tens of thousands of real-world intersections and authentic traffic demands validate the surprising effectiveness and generalizability of CityLight, with an overall performance gain of 11.66% and a 22.59% improvement in transfer scenarios in terms of throughput.