 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeightedPose: Generalizable Cross-Pose Estimation via Weighted SVD
May 03, 2024


We present a novel method for robotic manipulation tasks in human environments that require reasoning about the 3D geometric relationship between a pair of objects. Traditional end-to-end trained policies, which map from pixel observations to low-level robot actions, struggle to reason about complex pose relationships and have difficulty generalizing to unseen object configurations. To address these challenges, we propose a method that learns to reason about the 3D geometric relationship between objects, focusing on the relationship between key parts on one object with respect to key parts on another object. Our standalone model utilizes Weighted SVD to reason about both pose relationships between articulated parts and between free-floating objects. This approach allows the robot to understand the relationship between the oven door and the oven body, as well as the relationship between the lasagna plate and the oven, for example. By considering the 3D geometric relationship between objects, our method enables robots to perform complex manipulation tasks that reason about object-centric representations. We open source the code and demonstrate the results here
LLMs as Workers in Human-Computational Algorithms? Replicating Crowdsourcing Pipelines with LLMs
Jul 20, 2023
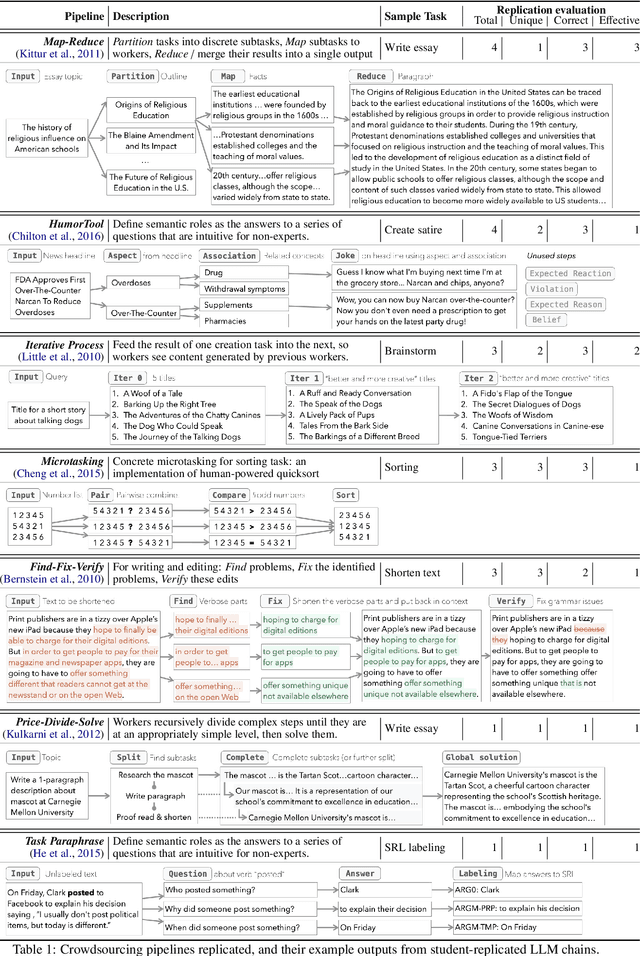
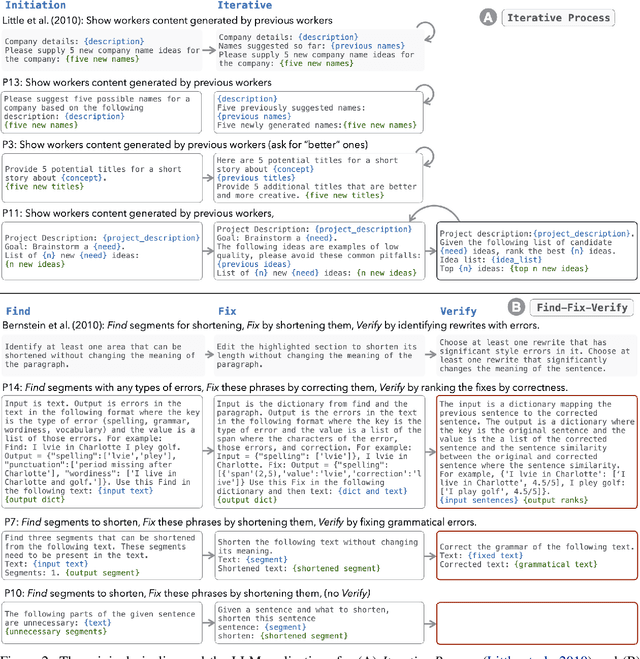
LLMs have shown promise in replicating human-like behavior in crowdsourcing tasks that were previously thought to be exclusive to human abilities. However, current efforts focus mainly on simple atomic tasks. We explore whether LLMs can replicate more complex crowdsourcing pipelines. We find that modern LLMs can simulate some of crowdworkers' abilities in these "human computation algorithms," but the level of success is variable and influenced by requesters' understanding of LLM capabilities, the specific skills required for sub-tasks, and the optimal interaction modality for performing these sub-tasks. We reflect on human and LLMs' different sensitivities to instructions, stress the importance of enabling human-facing safeguards for LLMs, and discuss the potential of training humans and LLMs with complementary skill sets. Crucially, we show that replicating crowdsourcing pipelines offers a valuable platform to investigate (1) the relative strengths of LLMs on different tasks (by cross-comparing their performances on sub-tasks) and (2) LLMs' potential in complex tasks, where they can complete part of the tasks while leaving others to humans.