 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated co-design of high-performance thermodynamic cycles via graph-based hierarchical reinforcement learning
Apr 14, 2026Thermodynamic cycles are pivotal in determining the efficacy of energy conversion systems. Traditional design methodologies, which rely on expert knowledge or exhaustive enumeration, are inefficient and lack scalability, thereby constraining the discovery of high-performance cycles. In this study, we introduce a graph-based hierarchical reinforcement learning approach for the co-design of structure parameters in thermodynamic cycles. These cycles are encoded as graphs, with components and connections depicted as nodes and edges, adhering to grammatical constraints. A deep learning-based thermophysical surrogate facilitates stable graph decoding and the simultaneous resolution of global parameters. Building on this foundation, we develop a hierarchical reinforcement learning framework wherein a high-level manager explores structural evolution and proposes candidate configurations, whereas a low-level worker optimizes parameters and provides performance rewards to steer the search towards high-performance regions. By integrating graph representation, thermophysical surrogate, and manager-worker learning, this method establishes a fully automated pipeline for encoding, decoding, and co-optimization. Using heat pump and heat engine cycles as case studies, the results demonstrate that the proposed method not only replicates classical cycle configurations but also identifies 18 and 21 novel heat pump and heat engine cycles, respectively. Relative to classical cycles, the novel configurations exhibit performance improvements of 4.6% and 133.3%, respectively, surpassing the traditional designs. This method effectively balances efficiency with broad applicability, providing a practical and scalable intelligent alternative to expert-driven thermodynamic cycle design.
CUTEv2: Unified and Configurable Matrix Extension for Diverse CPU Architectures with Minimal Design Overhead
Apr 13, 2026Matrix extensions have emerged as an essential feature in modern CPUs to address the surging demands of AI workloads. However, existing designs often incur substantial hardware and software design overhead. Tight coupling with the CPU pipeline complicates integration across diverse CPUs, while fine-grained synchronous instructions hinder the development of high-performance kernels. This paper proposes a unified and configurable CPU matrix extension architecture. By decoupling matrix units from the CPU pipeline, the design enables low-overhead integration while maintaining close coordination with existing compute and memory resources. The configurable matrix unit supports mixed-precision operations and adapts to diverse compute demands and memory bandwidth constraints. An asynchronous matrix multiplication abstraction with flexible granularity conceals hardware details, simplifies matrix-vector overlap, and supports a unified software stack. The architecture is integrated into four open-source CPU RTL platforms and evaluated on representative AI models. Matrix unit utilization under GEMM workloads exceeds 90% across all platforms. When configured with compute throughput and memory bandwidth comparable to Intel AMX, our design achieves speedups of 1.57x, 1.57x, and 2.31x on ResNet, BERT, and Llama3, with over 30% of the gains attributed to overlapped matrix-vector execution. A 4 TOPS@2GHz matrix unit occupies only 0.53 mm\textsuperscript{2} in 14nm CMOS. These results demonstrate strong cross-platform adaptability and effective hardware-software co-optimization, offering a practical matrix extension for the open-source community.
Physical Backdoor Trigger Activation of Autonomous Vehicle using Reachability Analysis
Mar 27, 2023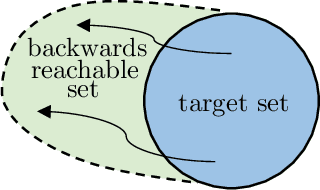
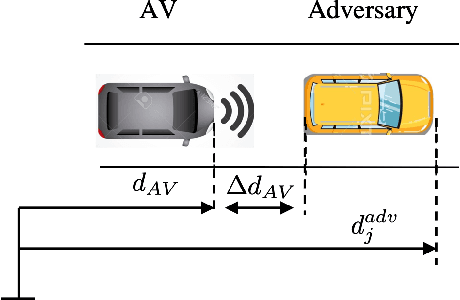
Recent studies reveal that Autonomous Vehicles (AVs) can be manipulated by hidden backdoors, causing them to perform harmful actions when activated by physical triggers. However, it is still unclear how these triggers can be activated while adhering to traffic principles. Understanding this vulnerability in a dynamic traffic environment is crucial. This work addresses this gap by presenting physical trigger activation as a reachability problem of controlled dynamic system. Our technique identifies security-critical areas in traffic systems where trigger conditions for accidents can be reached, and provides intended trajectories for how those conditions can be reached. Testing on typical traffic scenarios showed the system can be successfully driven to trigger conditions with near 100% activation rate. Our method benefits from identifying AV vulnerability and enabling effective safety strategies.
PiDAn: A Coherence Optimization Approach for Backdoor Attack Detection and Mitigation in Deep Neural Networks
Mar 26, 2022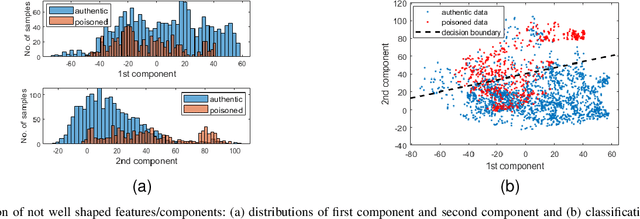
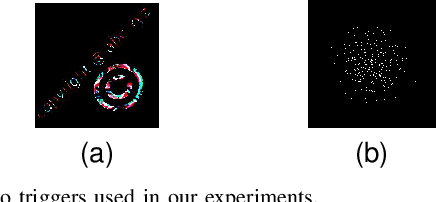
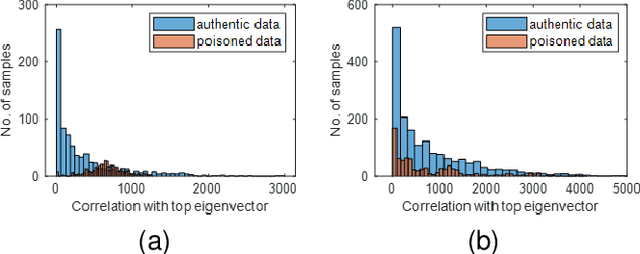
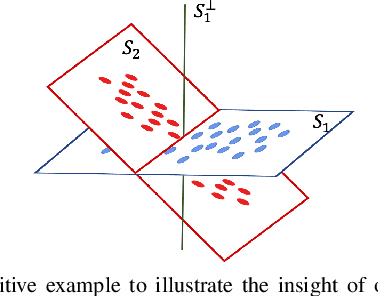
Backdoor attacks impose a new threat in Deep Neural Networks (DNNs), where a backdoor is inserted into the neural network by poisoning the training dataset, misclassifying inputs that contain the adversary trigger. The major challenge for defending against these attacks is that only the attacker knows the secret trigger and the target class. The problem is further exacerbated by the recent introduction of "Hidden Triggers", where the triggers are carefully fused into the input, bypassing detection by human inspection and causing backdoor identification through anomaly detection to fail. To defend against such imperceptible attacks, in this work we systematically analyze how representations, i.e., the set of neuron activations for a given DNN when using the training data as inputs, are affected by backdoor attacks. We propose PiDAn, an algorithm based on coherence optimization purifying the poisoned data. Our analysis shows that representations of poisoned data and authentic data in the target class are still embedded in different linear subspaces, which implies that they show different coherence with some latent spaces. Based on this observation, the proposed PiDAn algorithm learns a sample-wise weight vector to maximize the projected coherence of weighted samples, where we demonstrate that the learned weight vector has a natural "grouping effect" and is distinguishable between authentic data and poisoned data. This enables the systematic detection and mitigation of backdoor attacks. Based on our theoretical analysis and experimental results, we demonstrate the effectiveness of PiDAn in defending against backdoor attacks that use different settings of poisoned samples on GTSRB and ILSVRC2012 datasets. Our PiDAn algorithm can detect more than 90% infected classes and identify 95% poisoned samples.
Short-Term Traffic Forecasting Using High-Resolution Traffic Data
Jun 22, 2020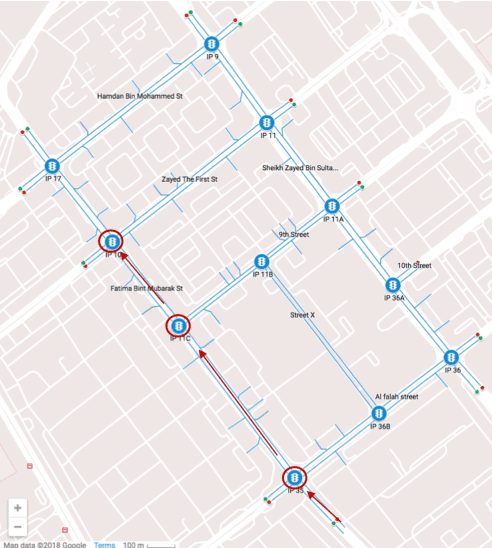
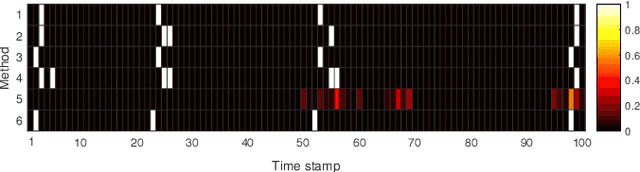
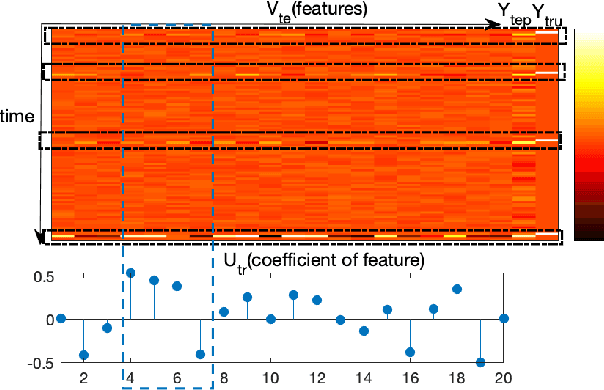
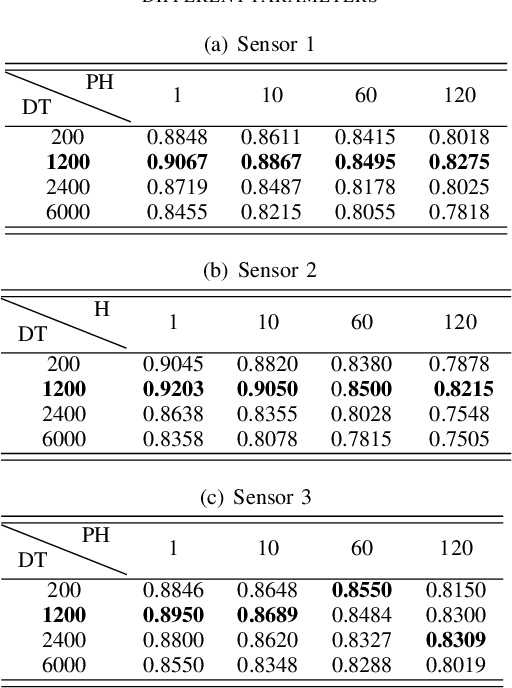
This paper develops a data-driven toolkit for traffic forecasting using high-resolution (a.k.a. event-based) traffic data. This is the raw data obtained from fixed sensors in urban roads. Time series of such raw data exhibit heavy fluctuations from one time step to the next (typically on the order of 0.1-1 second). Short-term forecasts (10-30 seconds into the future) of traffic conditions are critical for traffic operations applications (e.g., adaptive signal control). But traffic forecasting tools in the literature deal predominantly with 3-5 minute aggregated data, where the typical signal cycle is on the order of 2 minutes. This renders such forecasts useless at the operations level. To this end, we model the traffic forecasting problem as a matrix completion problem, where the forecasting inputs are mapped to a higher dimensional space using kernels. The formulation allows us to capture both nonlinear dependencies between forecasting inputs and outputs but also allows us to capture dependencies among the inputs. These dependencies correspond to correlations between different locations in the network. We further employ adaptive boosting to enhance the training accuracy and capture historical patterns in the data. The performance of the proposed methods is verified using high-resolution data obtained from a real-world traffic network in Abu Dhabi, UAE. Our experimental results show that the proposed method outperforms other state-of-the-art algorithms.
Nonlinear Traffic Prediction as a Matrix Completion Problem with Ensemble Learning
Jan 12, 2020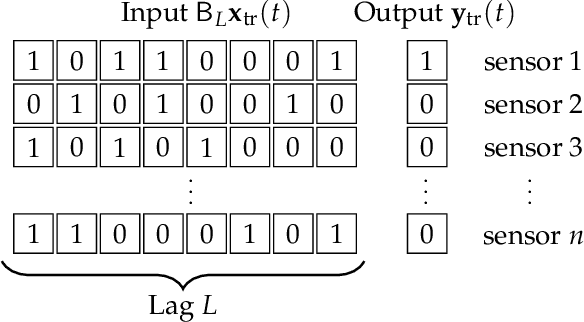
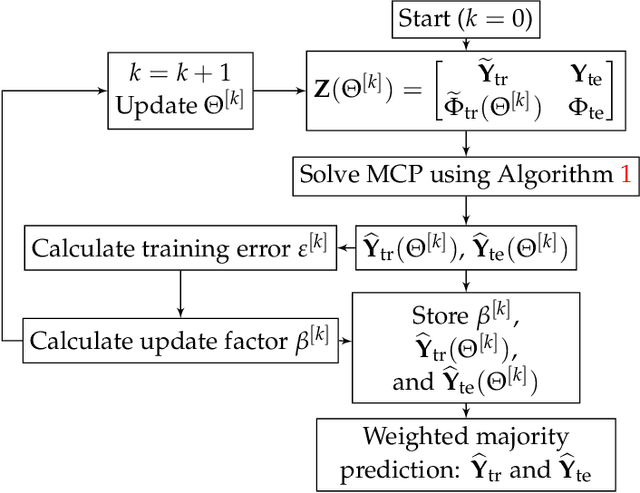
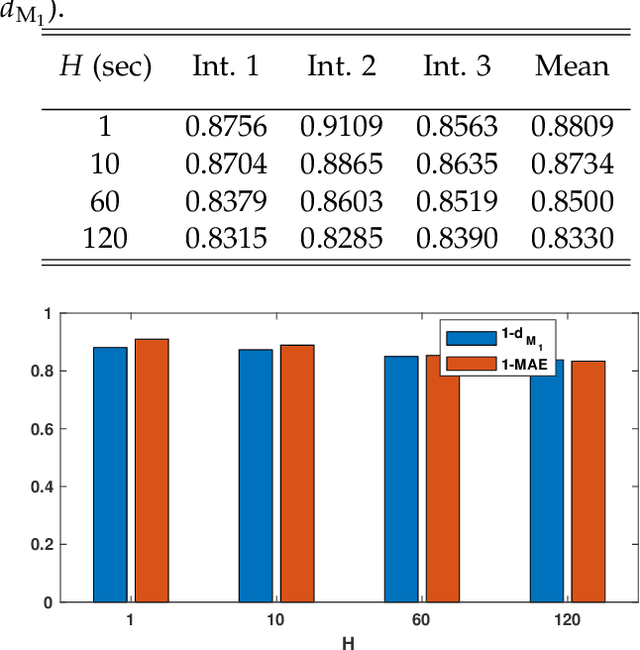
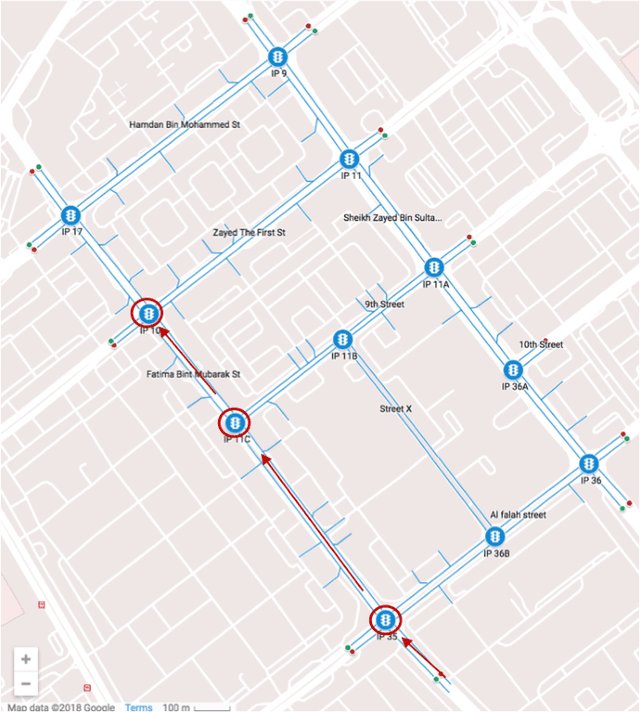
We focus on short-term traffic forecasting for traffic operations management. Specifically, we focus on forecasting traffic network sensor states in high-resolution (second-by-second). Most work on traffic forecasting has focused on predicting aggregated traffic variables, typically over intervals that are no shorter than 5 minutes. The data resolution required for traffic operations is challenging since high-resolution data exhibit heavier oscillations and precise patterns are harder to capture. We propose a (big) data-driven methodology for this purpose. Our contributions can be summarized as offering three major insights: first, we show how the forecasting problem can be modeled as a matrix completion problem. Second, we employ a block-coordinate descent algorithm and demonstrate that the algorithm converges in sub-linear time to a block coordinate-wise optimizer. This allows us to capitalize on the "bigness" of high-resolution data in a computationally feasible way. Third, we develop an adaptive boosting (or ensemble learning) approach to reduce the training error to within any arbitrary error threshold. The latter utilizes past days so that the boosting can be interpreted as capturing periodic patterns in the data. The performance of the proposed method is analyzed theoretically and tested empirically using a real-world high-resolution traffic dataset from Abu Dhabi, UAE. Our experimental results show that the proposed method outperforms other state-of-the-art algorithms.
Distributed dynamic modeling and monitoring for large-scale industrial processes under closed-loop control
Sep 07, 2018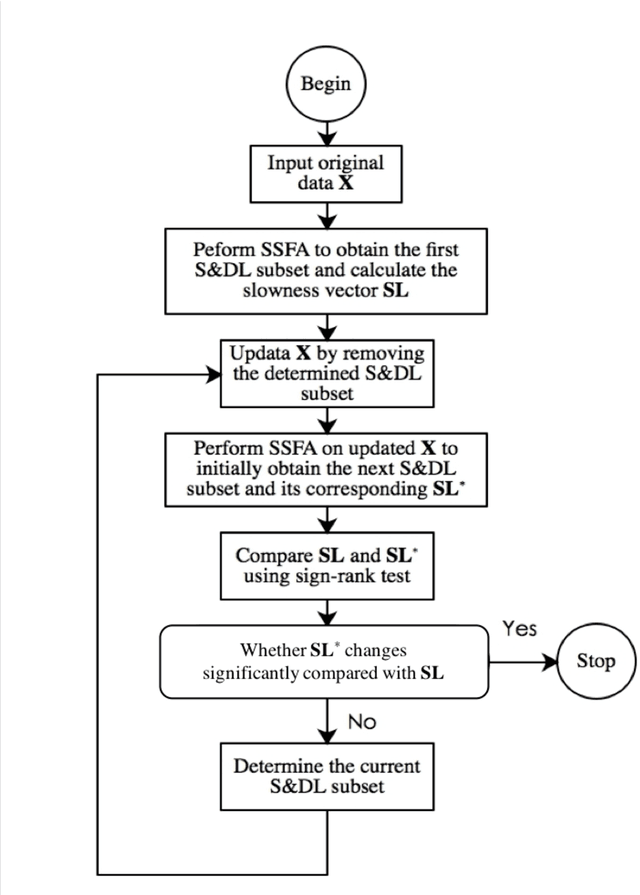
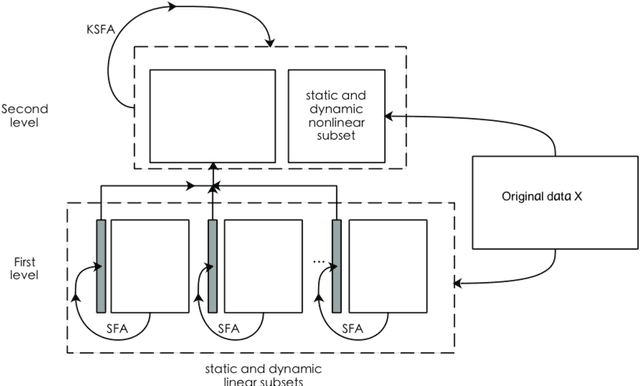
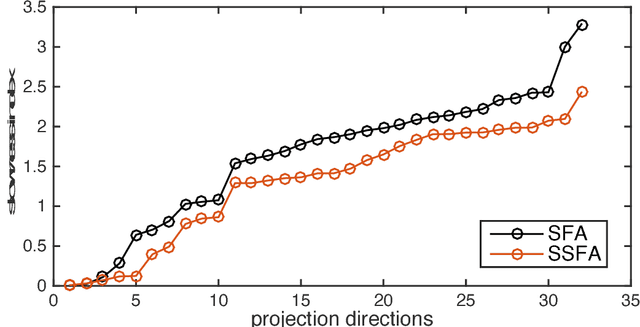
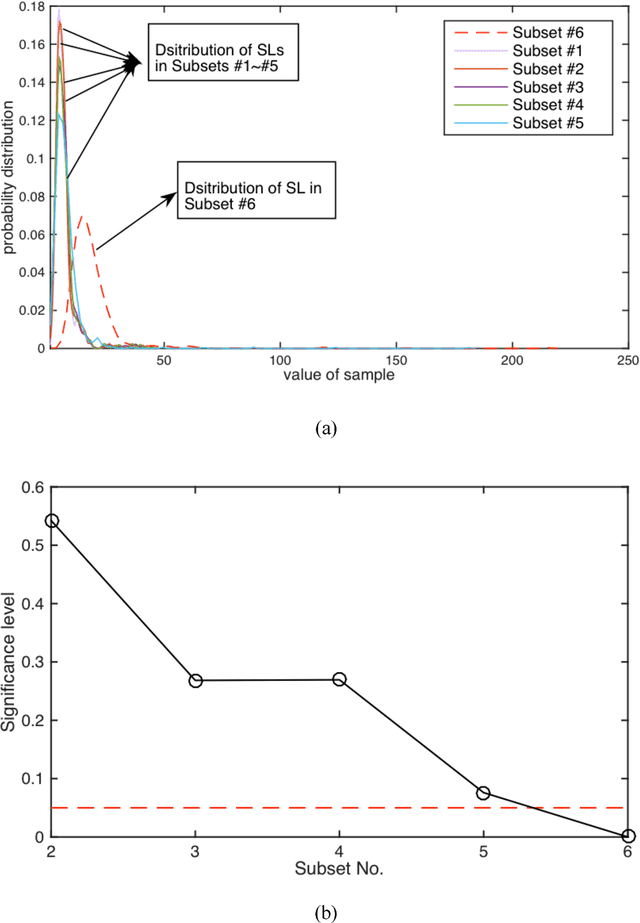
For large-scale industrial processes under closed-loop control, process dynamics directly resulting from control action are typical characteristics and may show different behaviors between real faults and normal changes of operating conditions. However, conventional distributed monitoring approaches do not consider the closed-loop control mechanism and only explore static characteristics, which thus are incapable of distinguishing between real process faults and nominal changes of operating conditions, leading to unnecessary alarms. In this regard, this paper proposes a distributed monitoring method for closed-loop industrial processes by concurrently exploring static and dynamic characteristics. First, the large-scale closed-loop process is decomposed into several subsystems by developing a sparse slow feature analysis (SSFA) algorithm which capture changes of both static and dynamic information. Second, distributed models are developed to separately capture static and dynamic characteristics from the local and global aspects. Based on the distributed monitoring system, a two-level monitoring strategy is proposed to check different influences on process characteristics resulting from changes of the operating conditions and control action, and thus the two changes can be well distinguished from each other. Case studies are conducted based on both benchmark data and real industrial process data to illustrate the effectiveness of the proposed method.