 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Backdoor Trigger Activation of Autonomous Vehicle using Reachability Analysis
Paper and Code
Mar 27, 2023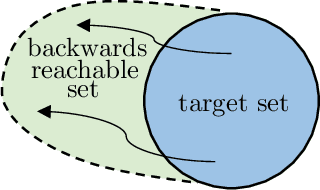
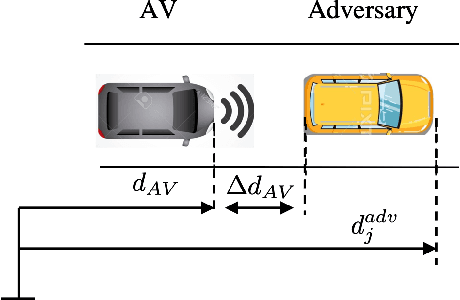
Recent studies reveal that Autonomous Vehicles (AVs) can be manipulated by hidden backdoors, causing them to perform harmful actions when activated by physical triggers. However, it is still unclear how these triggers can be activated while adhering to traffic principles. Understanding this vulnerability in a dynamic traffic environment is crucial. This work addresses this gap by presenting physical trigger activation as a reachability problem of controlled dynamic system. Our technique identifies security-critical areas in traffic systems where trigger conditions for accidents can be reached, and provides intended trajectories for how those conditions can be reached. Testing on typical traffic scenarios showed the system can be successfully driven to trigger conditions with near 100% activation rate. Our method benefits from identifying AV vulnerability and enabling effective safety strategies.