 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeETSM: Automating Dissection Trajectory Suggestion and Confidence Map-Based Safety Margin Prediction for Robot-assisted Endoscopic Submucosal Dissection
Nov 28, 2024Robot-assisted Endoscopic Submucosal Dissection (ESD) improves the surgical procedure by providing a more comprehensive view through advanced robotic instruments and bimanual operation, thereby enhancing dissection efficiency and accuracy. Accurate prediction of dissection trajectories is crucial for better decision-making, reducing intraoperative errors, and improving surgical training. Nevertheless, predicting these trajectories is challenging due to variable tumor margins and dynamic visual conditions. To address this issue, we create the ESD Trajectory and Confidence Map-based Safety Margin (ETSM) dataset with $1849$ short clips, focusing on submucosal dissection with a dual-arm robotic system. We also introduce a framework that combines optimal dissection trajectory prediction with a confidence map-based safety margin, providing a more secure and intelligent decision-making tool to minimize surgical risks for ESD procedures. Additionally, we propose the Regression-based Confidence Map Prediction Network (RCMNet), which utilizes a regression approach to predict confidence maps for dissection areas, thereby delineating various levels of safety margins. We evaluate our RCMNet using three distinct experimental setups: in-domain evaluation, robustness assessment, and out-of-domain evaluation. Experimental results show that our approach excels in the confidence map-based safety margin prediction task, achieving a mean absolute error (MAE) of only $3.18$. To the best of our knowledge, this is the first study to apply a regression approach for visual guidance concerning delineating varying safety levels of dissection areas. Our approach bridges gaps in current research by improving prediction accuracy and enhancing the safety of the dissection process, showing great clinical significance in practice.
PDZSeg: Adapting the Foundation Model for Dissection Zone Segmentation with Visual Prompts in Robot-assisted Endoscopic Submucosal Dissection
Nov 27, 2024Purpose: Endoscopic surgical environments present challenges for dissection zone segmentation due to unclear boundaries between tissue types, leading to segmentation errors where models misidentify or overlook edges. This study aims to provide precise dissection zone suggestions during endoscopic submucosal dissection (ESD) procedures, enhancing ESD safety. Methods: We propose the Prompted-based Dissection Zone Segmentation (PDZSeg) model, designed to leverage diverse visual prompts such as scribbles and bounding boxes. By overlaying these prompts onto images and fine-tuning a foundational model on a specialized dataset, our approach improves segmentation performance and user experience through flexible input methods. Results: The PDZSeg model was validated using three experimental setups: in-domain evaluation, variability in visual prompt availability, and robustness assessment. Using the ESD-DZSeg dataset, results show that our method outperforms state-of-the-art segmentation approaches. This is the first study to integrate visual prompt design into dissection zone segmentation. Conclusion: The PDZSeg model effectively utilizes visual prompts to enhance segmentation performance and user experience, supported by the novel ESD-DZSeg dataset as a benchmark for dissection zone segmentation in ESD. Our work establishes a foundation for future research.
PRSI: Privacy-Preserving Recommendation Model Based on Vector Splitting and Interactive Protocols
Nov 27, 2024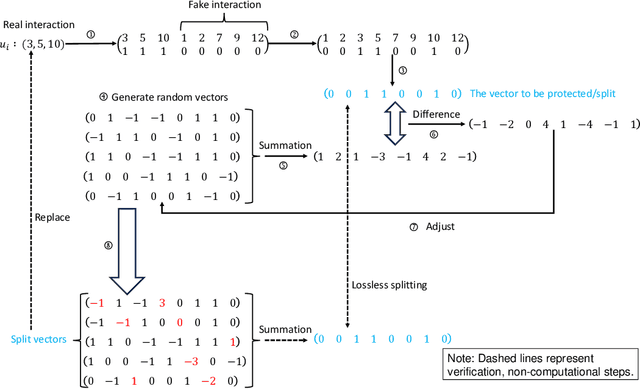

With the development of the internet, recommending interesting products to users has become a highly valuable research topic for businesses. Recommendation systems play a crucial role in addressing this issue. To prevent the leakage of each user's (client's) private data, Federated Recommendation Systems (FedRec) have been proposed and widely used. However, extensive research has shown that FedRec suffers from security issues such as data privacy leakage, and it is challenging to train effective models with FedRec when each client only holds interaction information for a single user. To address these two problems, this paper proposes a new privacy-preserving recommendation system (PRSI), which includes a preprocessing module and two main phases. The preprocessing module employs split vectors and fake interaction items to protect clients' interaction information and recommendation results. The two main phases are: (1) the collection of interaction information and (2) the sending of recommendation results. In the interaction information collection phase, each client uses the preprocessing module and random communication methods (according to the designed interactive protocol) to protect their ID information and IP addresses. In the recommendation results sending phase, the central server uses the preprocessing module and triplets to distribute recommendation results to each client under secure conditions, following the designed interactive protocol. Finally, we conducted multiple sets of experiments to verify the security, accuracy, and communication cost of the proposed method.