 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalization-Aware Multi-Scale Representation Learning for Repetitive Action Counting
Jan 13, 2025



Repetitive action counting (RAC) aims to estimate the number of class-agnostic action occurrences in a video without exemplars. Most current RAC methods rely on a raw frame-to-frame similarity representation for period prediction. However, this approach can be significantly disrupted by common noise such as action interruptions and inconsistencies, leading to sub-optimal counting performance in realistic scenarios. In this paper, we introduce a foreground localization optimization objective into similarity representation learning to obtain more robust and efficient video features. We propose a Localization-Aware Multi-Scale Representation Learning (LMRL) framework. Specifically, we apply a Multi-Scale Period-Aware Representation (MPR) with a scale-specific design to accommodate various action frequencies and learn more flexible temporal correlations. Furthermore, we introduce the Repetition Foreground Localization (RFL) method, which enhances the representation by coarsely identifying periodic actions and incorporating global semantic information. These two modules can be jointly optimized, resulting in a more discerning periodic action representation. Our approach significantly reduces the impact of noise, thereby improving counting accuracy. Additionally, the framework is designed to be scalable and adaptable to different types of video content. Experimental results on the RepCountA and UCFRep datasets demonstrate that our proposed method effectively handles repetitive action counting.
Skip-Plan: Procedure Planning in Instructional Videos via Condensed Action Space Learning
Oct 01, 2023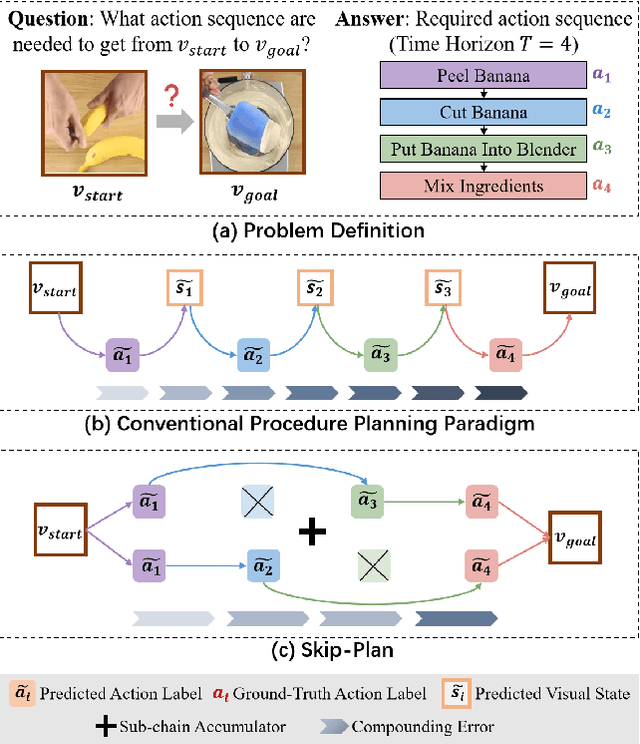
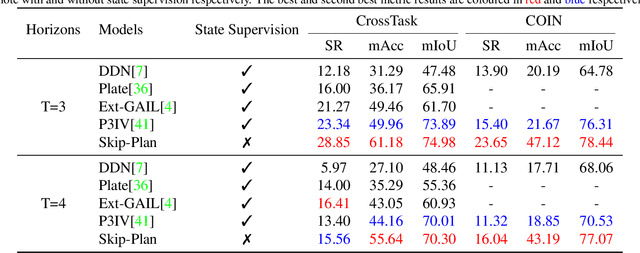
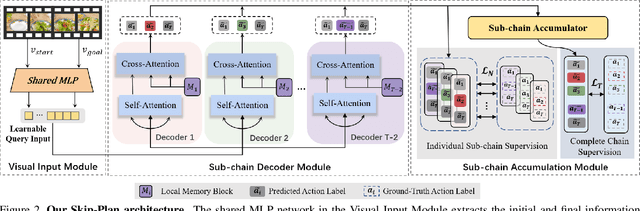

In this paper, we propose Skip-Plan, a condensed action space learning method for procedure planning in instructional videos. Current procedure planning methods all stick to the state-action pair prediction at every timestep and generate actions adjacently. Although it coincides with human intuition, such a methodology consistently struggles with high-dimensional state supervision and error accumulation on action sequences. In this work, we abstract the procedure planning problem as a mathematical chain model. By skipping uncertain nodes and edges in action chains, we transfer long and complex sequence functions into short but reliable ones in two ways. First, we skip all the intermediate state supervision and only focus on action predictions. Second, we decompose relatively long chains into multiple short sub-chains by skipping unreliable intermediate actions. By this means, our model explores all sorts of reliable sub-relations within an action sequence in the condensed action space. Extensive experiments show Skip-Plan achieves state-of-the-art performance on the CrossTask and COIN benchmarks for procedure planning.