 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy does Stereo Triangulation Not Work in UAV Distance Estimation
Jun 15, 2023



UAV distance estimation plays an important role for path planning of swarm UAVs and collision avoidance. However, the lack of annotated data seriously hinder the related studies. In this paper, we build and present a UAVDE dataset for UAV distance estimation, in which distance between two UAVs is obtained by UWB sensors. During experiments, we surprisingly observe that the commonly used stereo triangulation can not stand for UAV scenes. The core reason is the position deviation issue of UAVs due to long shooting distance and camera vibration, which is common in UAV scenes. To tackle this issue, we propose a novel position correction module (PCM), which can directly predict the offset between the image positions and the actual ones of UAVs and perform calculation compensation in stereo triangulation. Besides, to further boost performance on hard samples, we propose a dynamic iterative correction mechanism, which is composed of multiple stacked PCMs and a gating mechanism to adaptively determine whether further correction is required according to the difficulty of data samples. Consequently, the position deviation issue can be effectively alleviated. We conduct extensive experiments on UAVDE, and our proposed method can achieve a 38.84% performance improvement, which demonstrates its effectiveness and superiority. The code and dataset would be released.
Laser Data Based Automatic Generation of Lane-Level Road Map for Intelligent Vehicles
Dec 11, 2020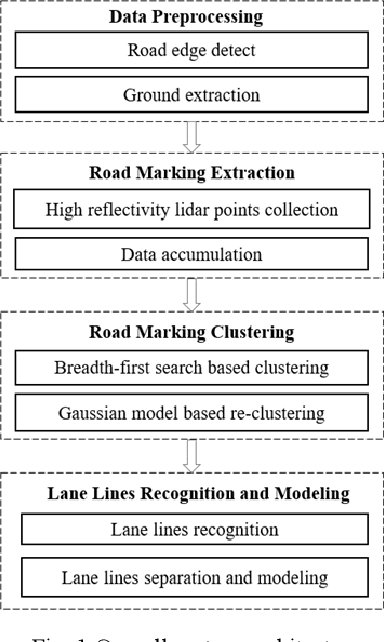
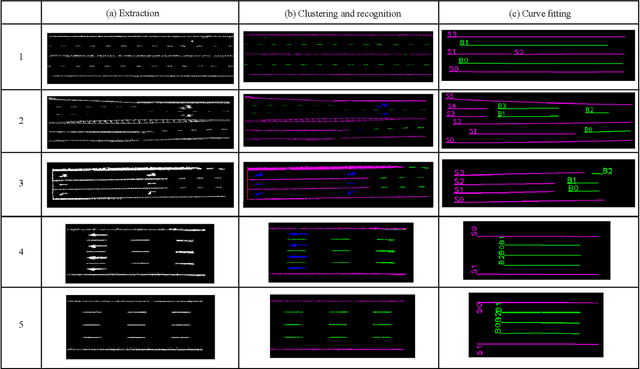
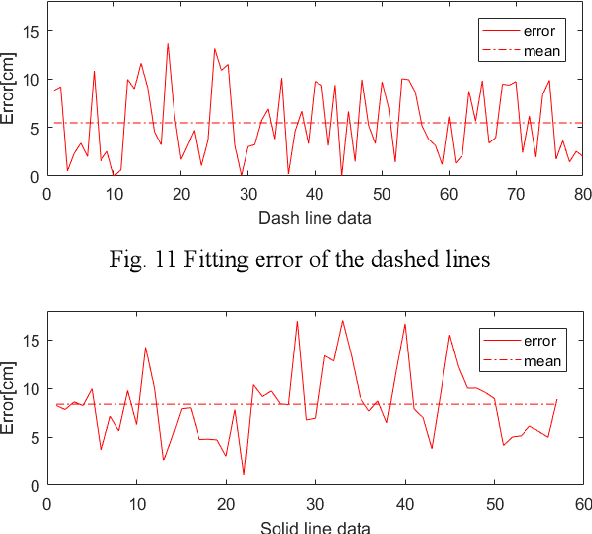
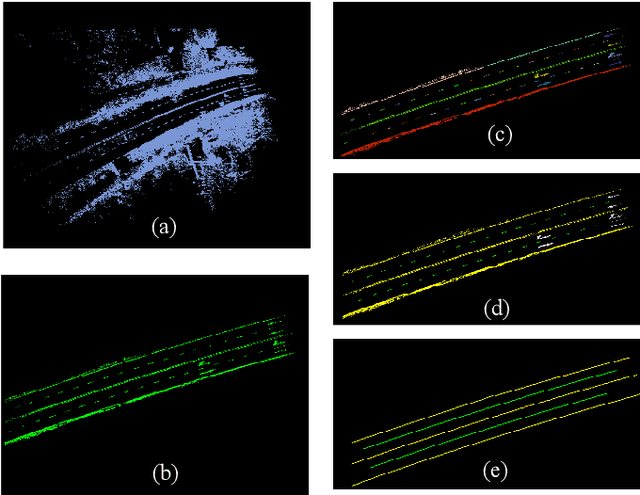
With the development of intelligent vehicle systems, a high-precision road map is increasingly needed in many aspects. The automatic lane lines extraction and modeling are the most essential steps for the generation of a precise lane-level road map. In this paper, an automatic lane-level road map generation system is proposed. To extract the road markings on the ground, the multi-region Otsu thresholding method is applied, which calculates the intensity value of laser data that maximizes the variance between background and road markings. The extracted road marking points are then projected to the raster image and clustered using a two-stage clustering algorithm. Lane lines are subsequently recognized from these clusters by the shape features of their minimum bounding rectangle. To ensure the storage efficiency of the map, the lane lines are approximated to cubic polynomial curves using a Bayesian estimation approach. The proposed lane-level road map generation system has been tested on urban and expressway conditions in Hefei, China. The experimental results on the datasets show that our method can achieve excellent extraction and clustering effect, and the fitted lines can reach a high position accuracy with an error of less than 10 cm
A Fast Point Cloud Ground Segmentation Approach Based on Coarse-To-Fine Markov Random Field
Nov 26, 2020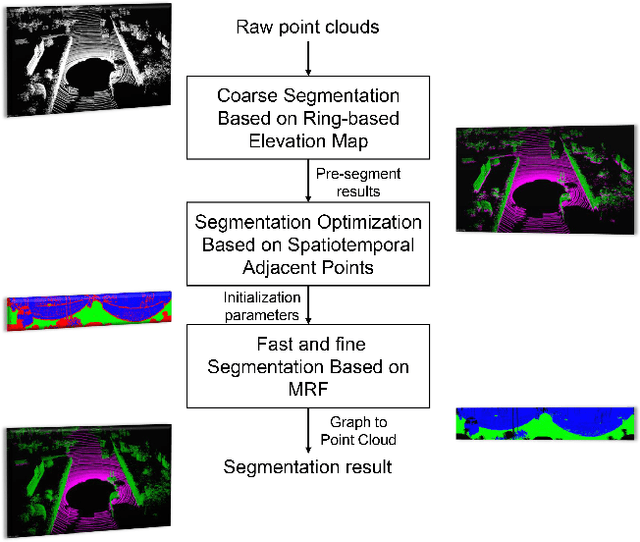
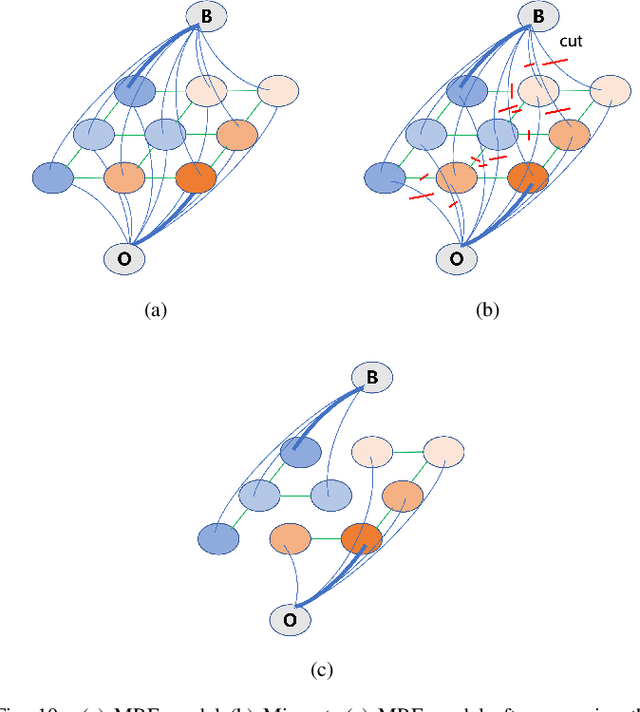
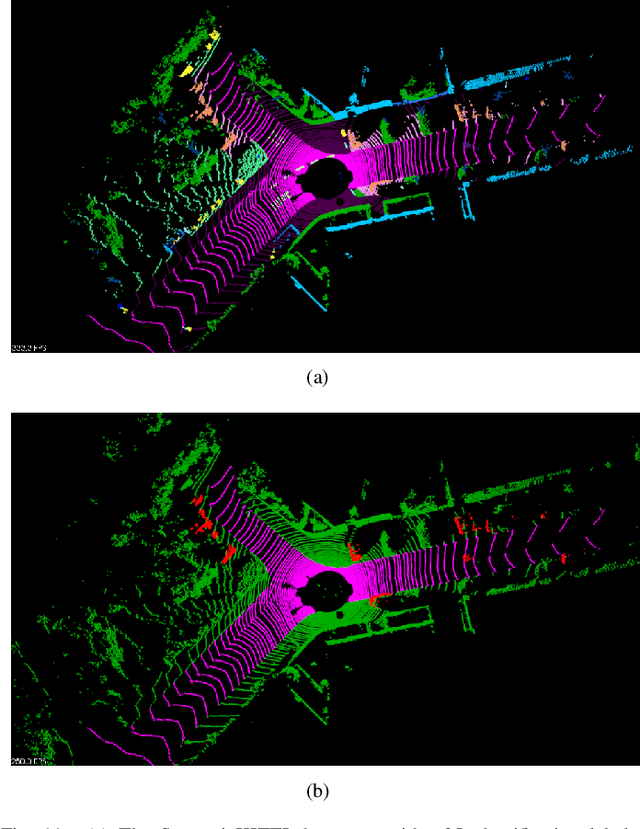
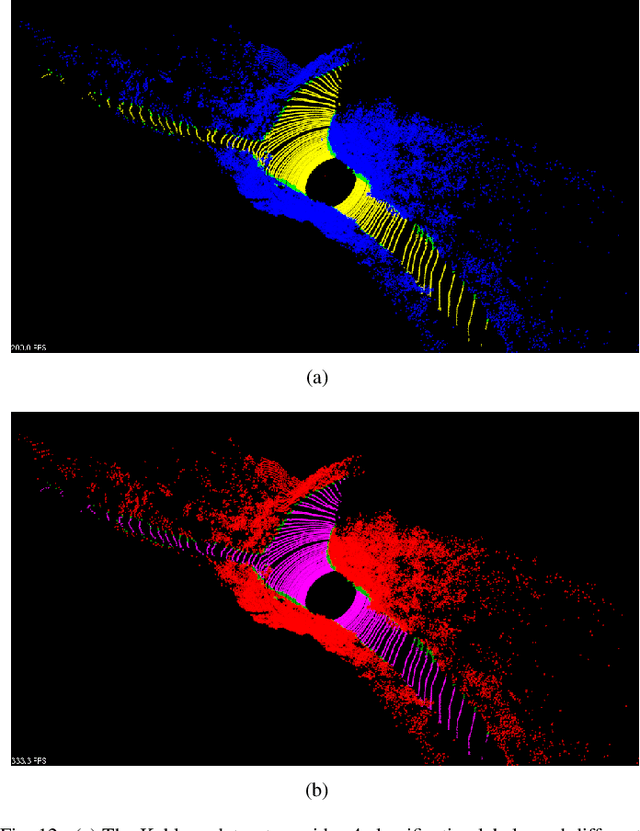
Ground segmentation is an important preprocessing task for autonomous vehicles (AVs) with 3D LiDARs. To solve the problem of existing ground segmentation methods being very difficult to balance accuracy and computational complexity, a fast point cloud ground segmentation approach based on a coarse-to-fine Markov random field (MRF) method is proposed. The method uses an improved elevation map for ground coarse segmentation, and then uses spatiotemporal adjacent points to optimize the segmentation results. The processed point cloud is classified into high-confidence obstacle points, ground points, and unknown classification points to initialize an MRF model. The graph cut method is then used to solve the model to achieve fine segmentation. Experiments on datasets showed that our method improves on other algorithms in terms of ground segmentation accuracy and is faster than other graph-based algorithms, which require only a single core of an I7-3770 CPU to process a frame of Velodyne HDL-64E data (in 39.77 ms, on average). Field tests were also conducted to demonstrate the effectiveness of the proposed method.