 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fast Point Cloud Ground Segmentation Approach Based on Coarse-To-Fine Markov Random Field
Paper and Code
Nov 26, 2020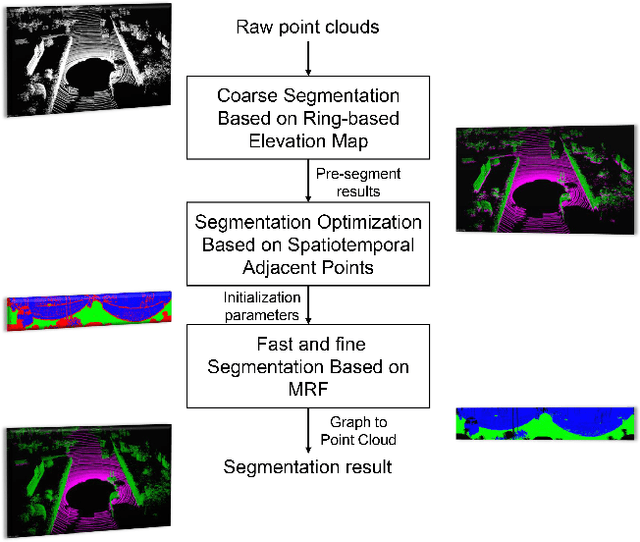
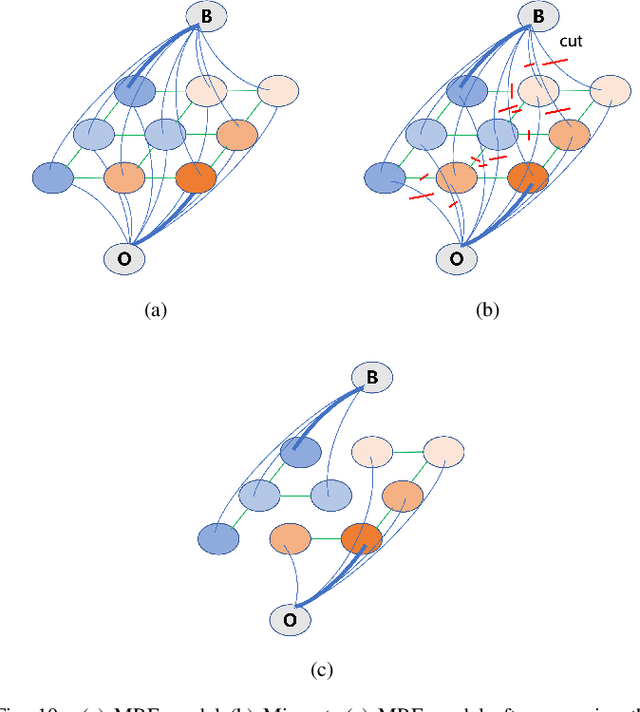
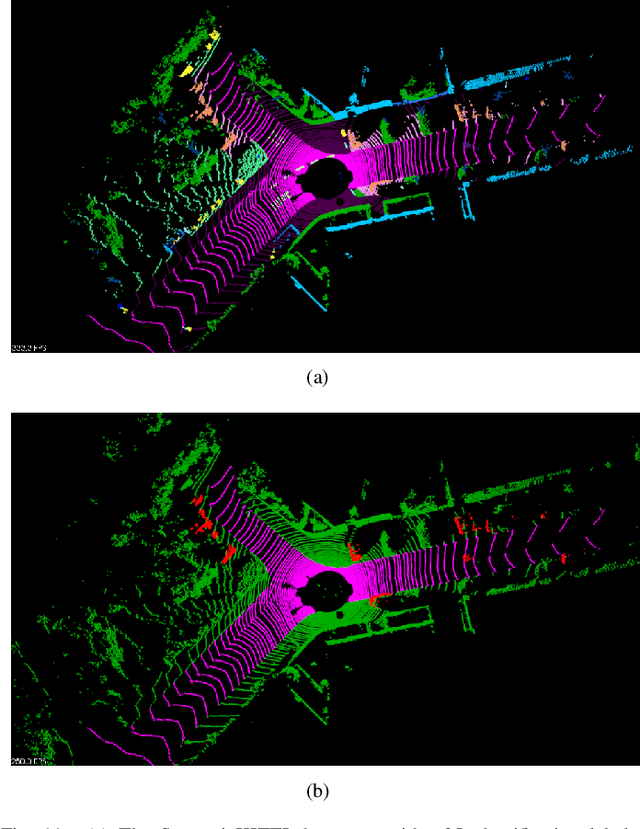
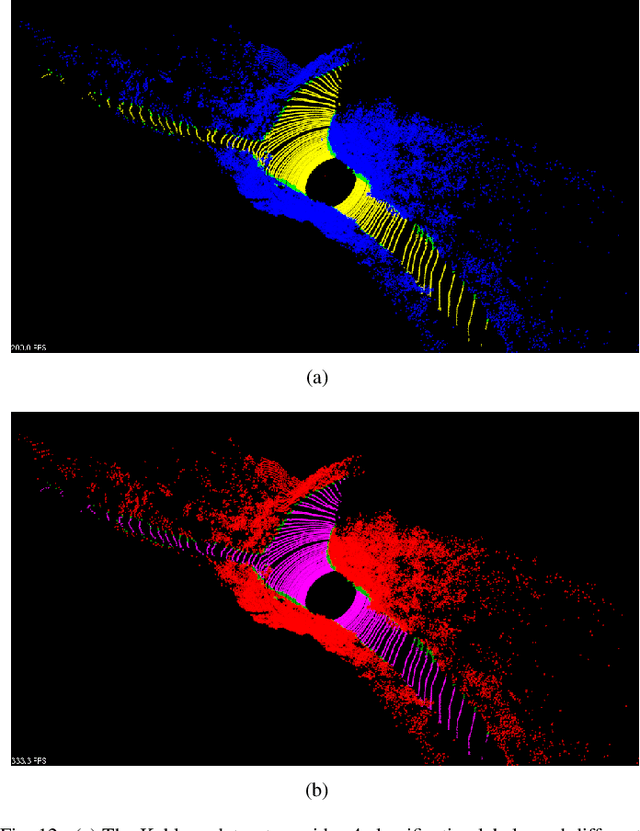
Ground segmentation is an important preprocessing task for autonomous vehicles (AVs) with 3D LiDARs. To solve the problem of existing ground segmentation methods being very difficult to balance accuracy and computational complexity, a fast point cloud ground segmentation approach based on a coarse-to-fine Markov random field (MRF) method is proposed. The method uses an improved elevation map for ground coarse segmentation, and then uses spatiotemporal adjacent points to optimize the segmentation results. The processed point cloud is classified into high-confidence obstacle points, ground points, and unknown classification points to initialize an MRF model. The graph cut method is then used to solve the model to achieve fine segmentation. Experiments on datasets showed that our method improves on other algorithms in terms of ground segmentation accuracy and is faster than other graph-based algorithms, which require only a single core of an I7-3770 CPU to process a frame of Velodyne HDL-64E data (in 39.77 ms, on average). Field tests were also conducted to demonstrate the effectiveness of the proposed method.