 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaser Data Based Automatic Generation of Lane-Level Road Map for Intelligent Vehicles
Dec 11, 2020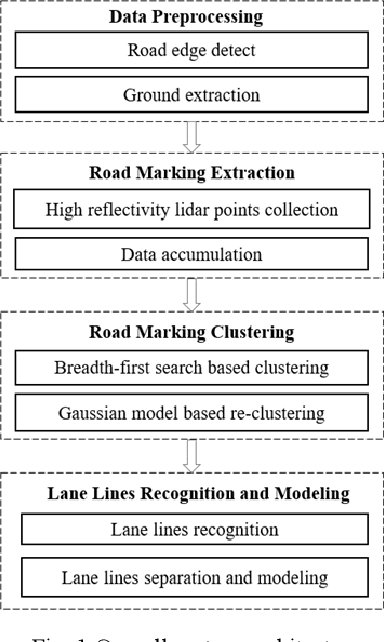
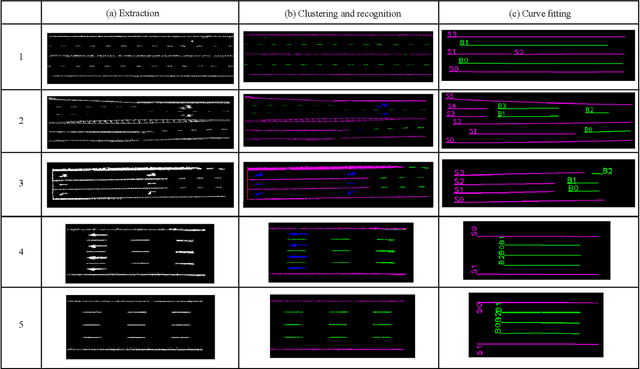
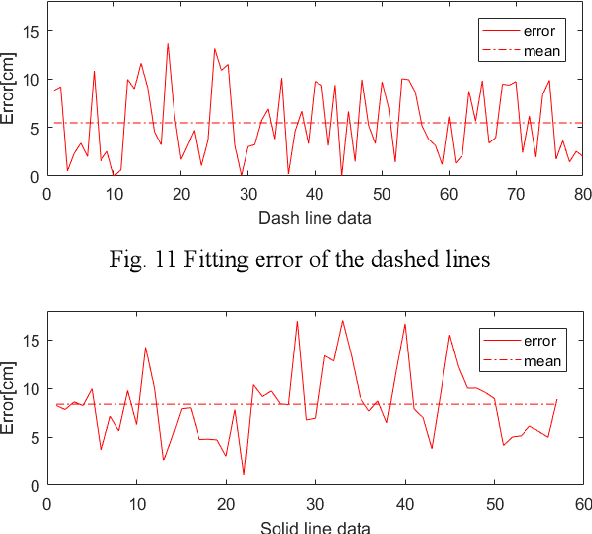
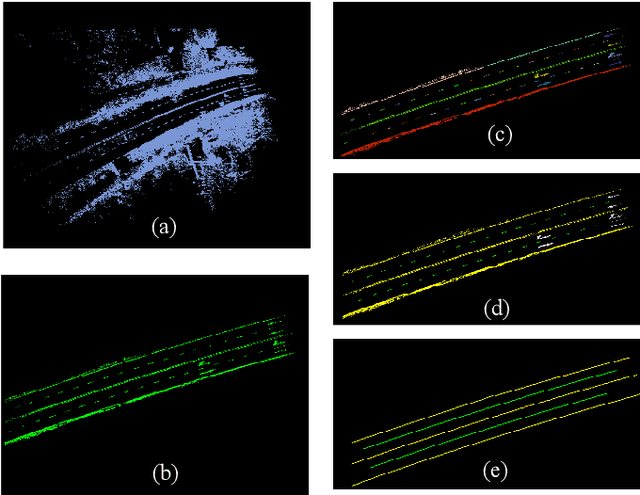
With the development of intelligent vehicle systems, a high-precision road map is increasingly needed in many aspects. The automatic lane lines extraction and modeling are the most essential steps for the generation of a precise lane-level road map. In this paper, an automatic lane-level road map generation system is proposed. To extract the road markings on the ground, the multi-region Otsu thresholding method is applied, which calculates the intensity value of laser data that maximizes the variance between background and road markings. The extracted road marking points are then projected to the raster image and clustered using a two-stage clustering algorithm. Lane lines are subsequently recognized from these clusters by the shape features of their minimum bounding rectangle. To ensure the storage efficiency of the map, the lane lines are approximated to cubic polynomial curves using a Bayesian estimation approach. The proposed lane-level road map generation system has been tested on urban and expressway conditions in Hefei, China. The experimental results on the datasets show that our method can achieve excellent extraction and clustering effect, and the fitted lines can reach a high position accuracy with an error of less than 10 cm