 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Next-Best-View Optimization for Risk-Averse Planning
Jun 02, 2026Multi-agent Next-Best-View (NBV) selection for safe path planning in uncertain and unknown environments requires informative, safety-aware, and efficient coordination. Centralized approaches rely on sharing raw sensor data or significant communication overhead, resulting in limited scalability. We propose a distributed, risk-aware multi-agent NBV framework in which each robot maintains a private local 3D Gaussian Splatting map and the team jointly maximizes expected information gain (EIG) restricted to masked zones along planned trajectories. The resulting distributed objective is solved by Consensus ADMM (C-ADMM) over a communication graph, with each robot exchanging only candidate viewpoints, planned trajectory descriptors, and scalar EIG contributions. Collision risk along each trajectory is modeled via Average Value-at-Risk (AV@R) over the local 3DGS map and used both to shape the masking radius and to score planned paths. Experiments in Gibson environments at multiple team sizes show that the distributed formulation approaches the centralized baseline in mapping quality and trajectory safety while reducing communication by orders of magnitude.
Conflict-Aware Active Perception and Control in 3D Gaussian Splatting Fields via Control Barrier Functions
May 19, 2026Active perception in uncertain environments requires robots to navigate safely while acquiring informative observations to reduce map uncertainty. These objectives inherently conflict, as informative viewpoints often lie near uncertain regions with higher collision risk. To address this challenge, we develop a conflict-aware active perception and control framework for robotic systems operating in environments represented by 3D Gaussian Splatting (3DGS). Safety is enforced using a Control Barrier Function (CBF) derived from an Average Value-at-Risk AV@R collision-risk metric that accounts for geometric uncertainty and guarantees forward invariance of a safe set. To improve perception, we propose a risk-aware Expected Information Gain (EIG) formulation for selecting the next-best-view and introduce perception barrier functions that align the camera orientation with the local information-ascent direction. To obtain a tractable formulation for these conflicting safety and perception objectives, we propose a unified safety-critical, perception-aware quadratic program that enforces safety as a hard constraint while relaxing perception constraints through slack variables. Simulation results demonstrate that the proposed method improves both safety and information acquisition compared to existing 3DGS-based approaches.
Scalable Networked Feature Selection with Randomized Algorithm for Robot Navigation
Mar 18, 2024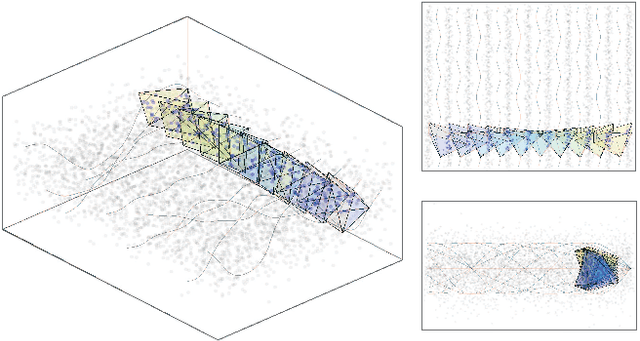
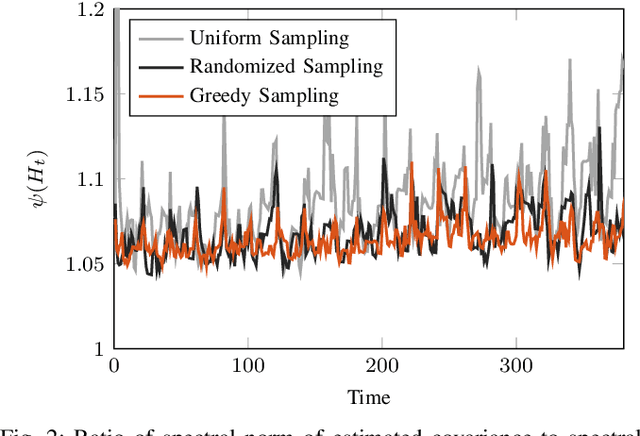
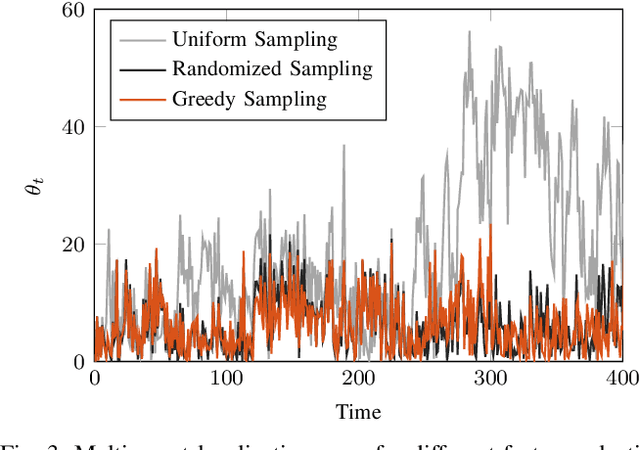
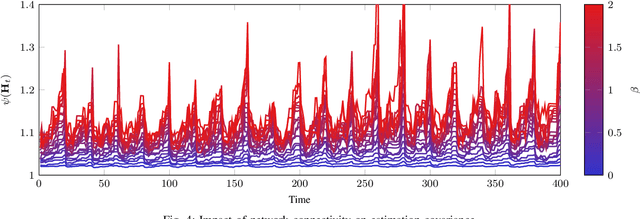
We address the problem of sparse selection of visual features for localizing a team of robots navigating an unknown environment, where robots can exchange relative position measurements with neighbors. We select a set of the most informative features by anticipating their importance in robots localization by simulating trajectories of robots over a prediction horizon. Through theoretical proofs, we establish a crucial connection between graph Laplacian and the importance of features. We show that strong network connectivity translates to uniformity in feature importance, which enables uniform random sampling of features and reduces the overall computational complexity. We leverage a scalable randomized algorithm for sparse sums of positive semidefinite matrices to efficiently select the set of the most informative features and significantly improve the probabilistic performance bounds. Finally, we support our findings with extensive simulations.
Beyond Uncertainty: Risk-Aware Active View Acquisition for Safe Robot Navigation and 3D Scene Understanding with FisherRF
Mar 18, 2024



This work proposes a novel approach to bolster both the robot's risk assessment and safety measures while deepening its understanding of 3D scenes, which is achieved by leveraging Radiance Field (RF) models and 3D Gaussian Splatting. To further enhance these capabilities, we incorporate additional sampled views from the environment with the RF model. One of our key contributions is the introduction of Risk-aware Environment Masking (RaEM), which prioritizes crucial information by selecting the next-best-view that maximizes the expected information gain. This targeted approach aims to minimize uncertainties surrounding the robot's path and enhance the safety of its navigation. Our method offers a dual benefit: improved robot safety and increased efficiency in risk-aware 3D scene reconstruction and understanding. Extensive experiments in real-world scenarios demonstrate the effectiveness of our proposed approach, highlighting its potential to establish a robust and safety-focused framework for active robot exploration and 3D scene understanding.