 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Meta-Reinforcement Learning with Online Self-Supervision
Jul 19, 2021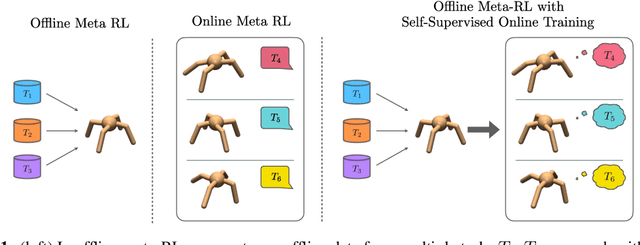
Meta-reinforcement learning (RL) can meta-train policies that adapt to new tasks with orders of magnitude less data than standard RL, but meta-training itself is costly and time-consuming. If we can meta-train on offline data, then we can reuse the same static dataset, labeled once with rewards for different tasks, to meta-train policies that adapt to a variety of new tasks at meta-test time. Although this capability would make meta-RL a practical tool for real-world use, offline meta-RL presents additional challenges beyond online meta-RL or standard offline RL settings. Meta-RL learns an exploration strategy that collects data for adapting, and also meta-trains a policy that quickly adapts to data from a new task. Since this policy was meta-trained on a fixed, offline dataset, it might behave unpredictably when adapting to data collected by the learned exploration strategy, which differs systematically from the offline data and thus induces distributional shift. We do not want to remove this distributional shift by simply adopting a conservative exploration strategy, because learning an exploration strategy enables an agent to collect better data for faster adaptation. Instead, we propose a hybrid offline meta-RL algorithm, which uses offline data with rewards to meta-train an adaptive policy, and then collects additional unsupervised online data, without any reward labels to bridge this distribution shift. By not requiring reward labels for online collection, this data can be much cheaper to collect. We compare our method to prior work on offline meta-RL on simulated robot locomotion and manipulation tasks and find that using additional unsupervised online data collection leads to a dramatic improvement in the adaptive capabilities of the meta-trained policies, matching the performance of fully online meta-RL on a range of challenging domains that require generalization to new tasks.
DisCo RL: Distribution-Conditioned Reinforcement Learning for General-Purpose Policies
Apr 23, 2021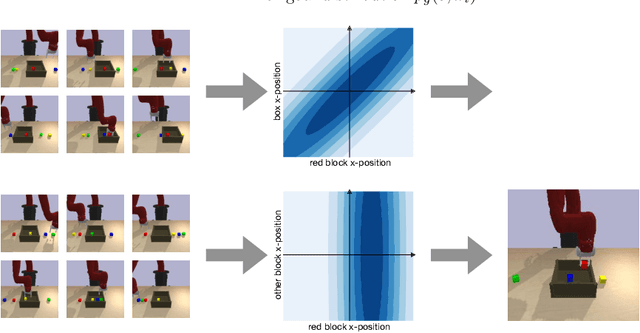
Can we use reinforcement learning to learn general-purpose policies that can perform a wide range of different tasks, resulting in flexible and reusable skills? Contextual policies provide this capability in principle, but the representation of the context determines the degree of generalization and expressivity. Categorical contexts preclude generalization to entirely new tasks. Goal-conditioned policies may enable some generalization, but cannot capture all tasks that might be desired. In this paper, we propose goal distributions as a general and broadly applicable task representation suitable for contextual policies. Goal distributions are general in the sense that they can represent any state-based reward function when equipped with an appropriate distribution class, while the particular choice of distribution class allows us to trade off expressivity and learnability. We develop an off-policy algorithm called distribution-conditioned reinforcement learning (DisCo RL) to efficiently learn these policies. We evaluate DisCo RL on a variety of robot manipulation tasks and find that it significantly outperforms prior methods on tasks that require generalization to new goal distributions.
Outcome-Driven Reinforcement Learning via Variational Inference
Apr 20, 2021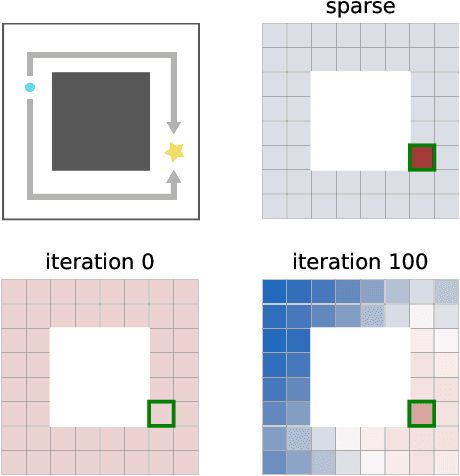



While reinforcement learning algorithms provide automated acquisition of optimal policies, practical application of such methods requires a number of design decisions, such as manually designing reward functions that not only define the task, but also provide sufficient shaping to accomplish it. In this paper, we discuss a new perspective on reinforcement learning, recasting it as the problem of inferring actions that achieve desired outcomes, rather than a problem of maximizing rewards. To solve the resulting outcome-directed inference problem, we establish a novel variational inference formulation that allows us to derive a well-shaped reward function which can be learned directly from environment interactions. From the corresponding variational objective, we also derive a new probabilistic Bellman backup operator reminiscent of the standard Bellman backup operator and use it to develop an off-policy algorithm to solve goal-directed tasks. We empirically demonstrate that this method eliminates the need to design reward functions and leads to effective goal-directed behaviors.
Planning with Goal-Conditioned Policies
Nov 19, 2019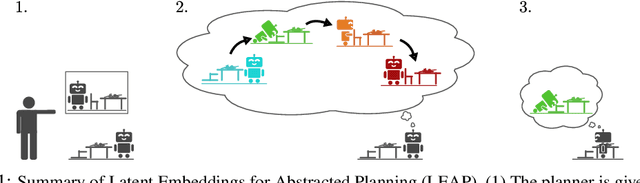
Planning methods can solve temporally extended sequential decision making problems by composing simple behaviors. However, planning requires suitable abstractions for the states and transitions, which typically need to be designed by hand. In contrast, model-free reinforcement learning (RL) can acquire behaviors from low-level inputs directly, but often struggles with temporally extended tasks. Can we utilize reinforcement learning to automatically form the abstractions needed for planning, thus obtaining the best of both approaches? We show that goal-conditioned policies learned with RL can be incorporated into planning, so that a planner can focus on which states to reach, rather than how those states are reached. However, with complex state observations such as images, not all inputs represent valid states. We therefore also propose using a latent variable model to compactly represent the set of valid states for the planner, so that the policies provide an abstraction of actions, and the latent variable model provides an abstraction of states. We compare our method with planning-based and model-free methods and find that our method significantly outperforms prior work when evaluated on image-based robot navigation and manipulation tasks that require non-greedy, multi-staged behavior.
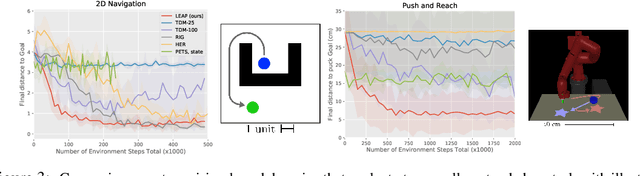
Skew-Fit: State-Covering Self-Supervised Reinforcement Learning
Mar 08, 2019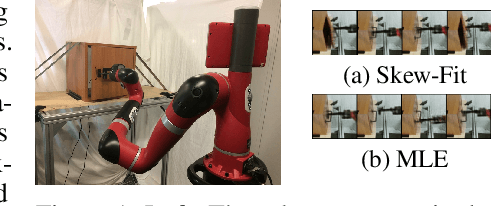
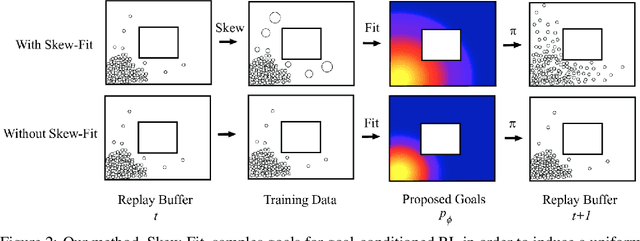
In standard reinforcement learning, each new skill requires a manually-designed reward function, which takes considerable manual effort and engineering. Self-supervised goal setting has the potential to automate this process, enabling an agent to propose its own goals and acquire skills that achieve these goals. However, such methods typically rely on manually-designed goal distributions, or heuristics to force the agent to explore a wide range of states. We propose a formal exploration objective for goal-reaching policies that maximizes state coverage. We show that this objective is equivalent to maximizing the entropy of the goal distribution together with goal reaching performance, where goals correspond to entire states. We present an algorithm called Skew-Fit for learning such a maximum-entropy goal distribution, and show that under certain regularity conditions, our method converges to a uniform distribution over the set of possible states, even when we do not know this set beforehand. Skew-Fit enables self-supervised agents to autonomously choose and practice diverse goals. Our experiments show that it can learn a variety of manipulation tasks from images, including opening a door with a real robot, entirely from scratch and without any manually-designed reward function.