 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoCLIP: Motion-Aware Fine-Tuning and Distillation of CLIP for Human Motion Generation
May 16, 2025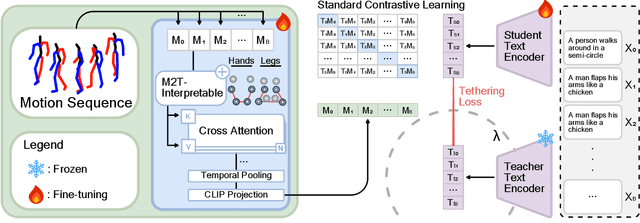

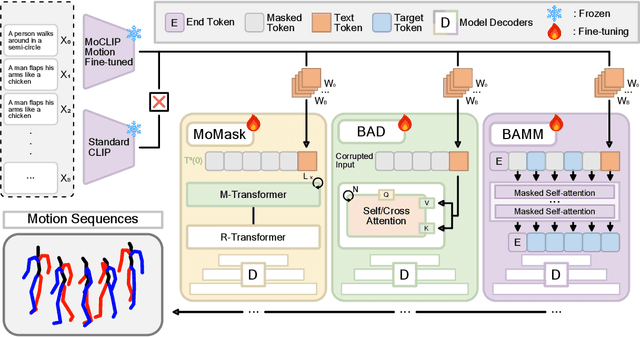
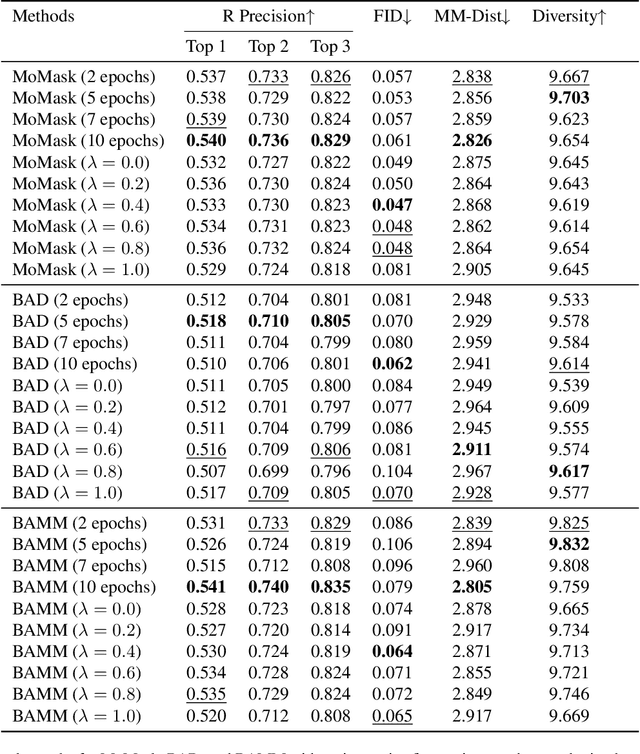
Human motion generation is essential for fields such as animation, robotics, and virtual reality, requiring models that effectively capture motion dynamics from text descriptions. Existing approaches often rely on Contrastive Language-Image Pretraining (CLIP)-based text encoders, but their training on text-image pairs constrains their ability to understand temporal and kinematic structures inherent in motion and motion generation. This work introduces MoCLIP, a fine-tuned CLIP model with an additional motion encoding head, trained on motion sequences using contrastive learning and tethering loss. By explicitly incorporating motion-aware representations, MoCLIP enhances motion fidelity while remaining compatible with existing CLIP-based pipelines and seamlessly integrating into various CLIP-based methods. Experiments demonstrate that MoCLIP improves Top-1, Top-2, and Top-3 accuracy while maintaining competitive FID, leading to improved text-to-motion alignment results. These results highlight MoCLIP's versatility and effectiveness, establishing it as a robust framework for enhancing motion generation.
PHEVA: A Privacy-preserving Human-centric Video Anomaly Detection Dataset
Aug 26, 2024

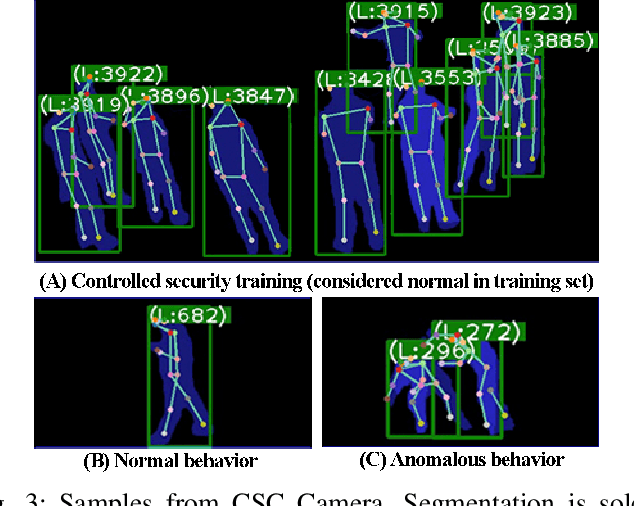
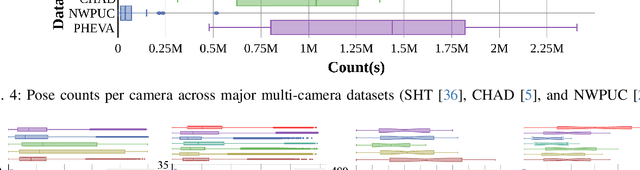
PHEVA, a Privacy-preserving Human-centric Ethical Video Anomaly detection dataset. By removing pixel information and providing only de-identified human annotations, PHEVA safeguards personally identifiable information. The dataset includes seven indoor/outdoor scenes, featuring one novel, context-specific camera, and offers over 5x the pose-annotated frames compared to the largest previous dataset. This study benchmarks state-of-the-art methods on PHEVA using a comprehensive set of metrics, including the 10% Error Rate (10ER), a metric used for anomaly detection for the first time providing insights relevant to real-world deployment. As the first of its kind, PHEVA bridges the gap between conventional training and real-world deployment by introducing continual learning benchmarks, with models outperforming traditional methods in 82.14% of cases. The dataset is publicly available at https://github.com/TeCSAR-UNCC/PHEVA.git.
VegaEdge: Edge AI Confluence Anomaly Detection for Real-Time Highway IoT-Applications
Nov 14, 2023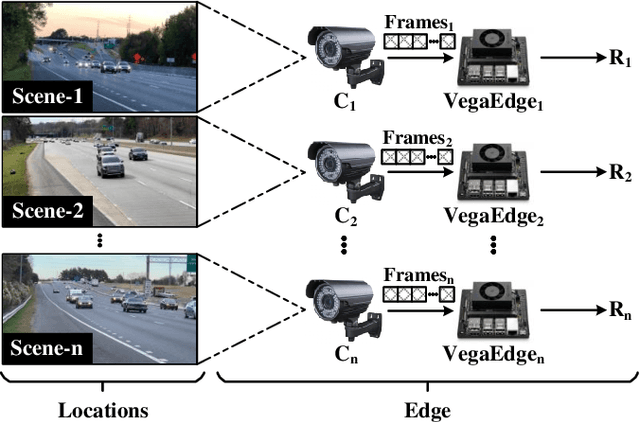
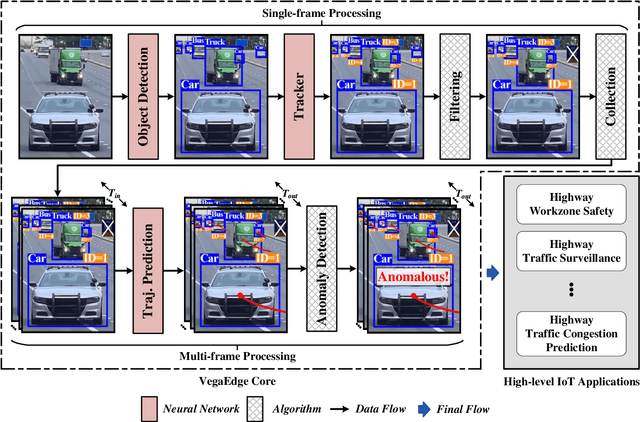
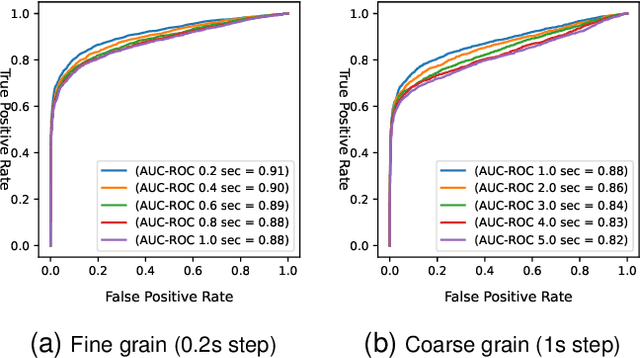
Vehicle anomaly detection plays a vital role in highway safety applications such as accident prevention, rapid response, traffic flow optimization, and work zone safety. With the surge of the Internet of Things (IoT) in recent years, there has arisen a pressing demand for Artificial Intelligence (AI) based anomaly detection methods designed to meet the requirements of IoT devices. Catering to this futuristic vision, we introduce a lightweight approach to vehicle anomaly detection by utilizing the power of trajectory prediction. Our proposed design identifies vehicles deviating from expected paths, indicating highway risks from different camera-viewing angles from real-world highway datasets. On top of that, we present VegaEdge - a sophisticated AI confluence designed for real-time security and surveillance applications in modern highway settings through edge-centric IoT-embedded platforms equipped with our anomaly detection approach. Extensive testing across multiple platforms and traffic scenarios showcases the versatility and effectiveness of VegaEdge. This work also presents the Carolinas Anomaly Dataset (CAD), to bridge the existing gap in datasets tailored for highway anomalies. In real-world scenarios, our anomaly detection approach achieves an AUC-ROC of 0.94, and our proposed VegaEdge design, on an embedded IoT platform, processes 738 trajectories per second in a typical highway setting. The dataset is available at https://github.com/TeCSAR-UNCC/Carolinas_Dataset#chd-anomaly-test-set .
VT-Former: A Transformer-based Vehicle Trajectory Prediction Approach For Intelligent Highway Transportation Systems
Nov 11, 2023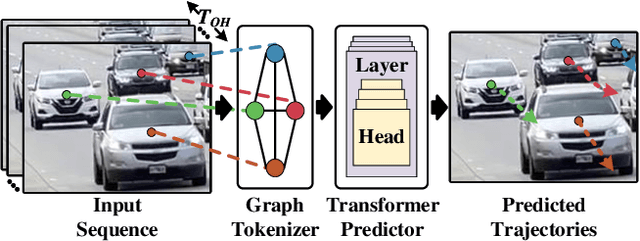
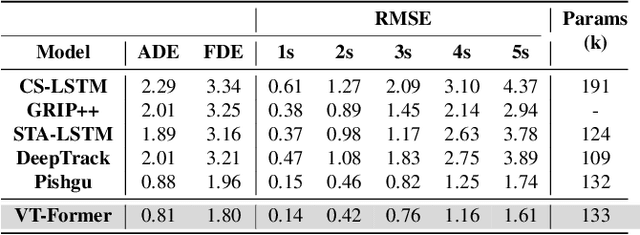
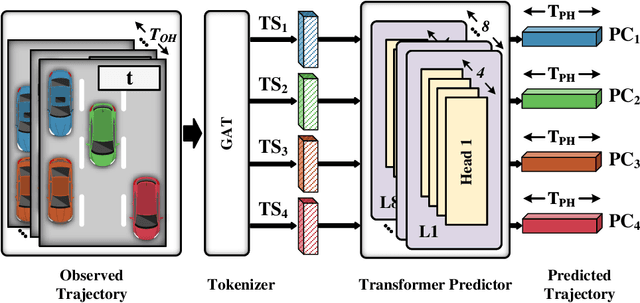

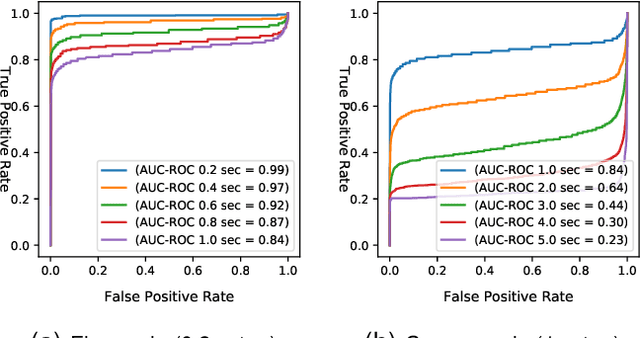
Enhancing roadway safety and traffic management has become an essential focus area for a broad range of modern cyber-physical systems and intelligent transportation systems. Vehicle Trajectory Prediction is a pivotal element within numerous applications for highway and road safety. These applications encompass a wide range of use cases, spanning from traffic management and accident prevention to enhancing work-zone safety and optimizing energy conservation. The ability to implement intelligent management in this context has been greatly advanced by the developments in the field of Artificial Intelligence (AI), alongside the increasing deployment of surveillance cameras across road networks. In this paper, we introduce a novel transformer-based approach for vehicle trajectory prediction for highway safety and surveillance, denoted as VT-Former. In addition to utilizing transformers to capture long-range temporal patterns, a new Graph Attentive Tokenization (GAT) module has been proposed to capture intricate social interactions among vehicles. Combining these two core components culminates in a precise approach for vehicle trajectory prediction. Our study on three benchmark datasets with three different viewpoints demonstrates the State-of-The-Art (SoTA) performance of VT-Former in vehicle trajectory prediction and its generalizability and robustness. We also evaluate VT-Former's efficiency on embedded boards and explore its potential for vehicle anomaly detection as a sample application, showcasing its broad applicability.
A POV-based Highway Vehicle Trajectory Dataset and Prediction Architecture
Mar 10, 2023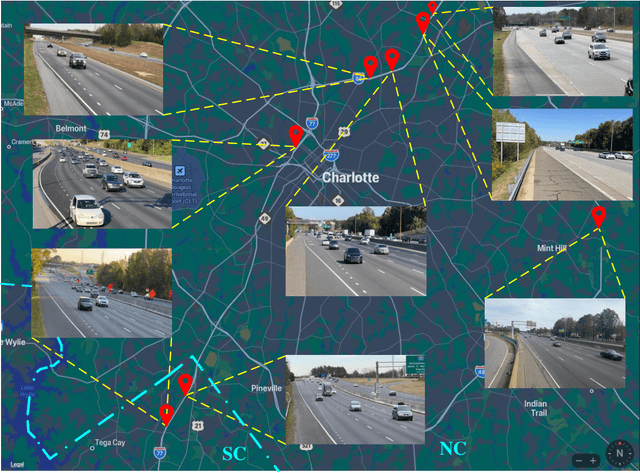
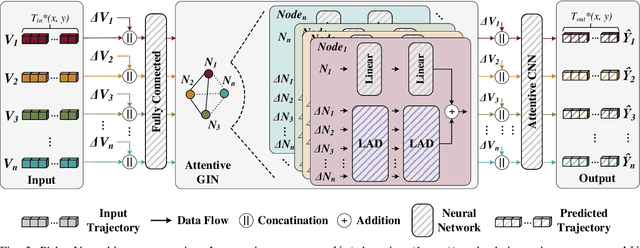
Vehicle Trajectory datasets that provide multiple point-of-views (POVs) can be valuable for various traffic safety and management applications. Despite the abundance of trajectory datasets, few offer a comprehensive and diverse range of driving scenes, capturing multiple viewpoints of various highway layouts, merging lanes, and configurations. This limits their ability to capture the nuanced interactions between drivers, vehicles, and the roadway infrastructure. We introduce the \emph{Carolinas Highway Dataset (CHD\footnote{\emph{CHD} available at: \url{https://github.com/TeCSAR-UNCC/Carolinas\_Dataset}})}, a vehicle trajectory, detection, and tracking dataset. \emph{CHD} is a collection of 1.6 million frames captured in highway-based videos from eye-level and high-angle POVs at eight locations across Carolinas with 338,000 vehicle trajectories. The locations, timing of recordings, and camera angles were carefully selected to capture various road geometries, traffic patterns, lighting conditions, and driving behaviors. We also present \emph{PishguVe}\footnote{\emph{PishguVe} code available at: \url{https://github.com/TeCSAR-UNCC/PishguVe}}, a novel vehicle trajectory prediction architecture that uses attention-based graph isomorphism and convolutional neural networks. The results demonstrate that \emph{PishguVe} outperforms existing algorithms to become the new state-of-the-art (SotA) in bird's-eye, eye-level, and high-angle POV trajectory datasets. Specifically, it achieves a 12.50\% and 10.20\% improvement in ADE and FDE, respectively, over the current SotA on NGSIM dataset. Compared to best-performing models on CHD, \emph{PishguVe} achieves lower ADE and FDE on eye-level data by 14.58\% and 27.38\%, respectively, and improves ADE and FDE on high-angle data by 8.3\% and 6.9\%, respectively.
Understanding the Challenges and Opportunities of Pose-based Anomaly Detection
Mar 09, 2023
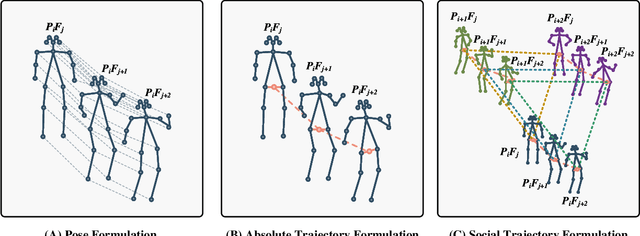

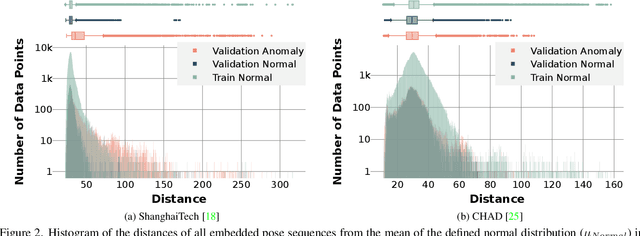
Pose-based anomaly detection is a video-analysis technique for detecting anomalous events or behaviors by examining human pose extracted from the video frames. Utilizing pose data alleviates privacy and ethical issues. Also, computation-wise, the complexity of pose-based models is lower than pixel-based approaches. However, it introduces more challenges, such as noisy skeleton data, losing important pixel information, and not having enriched enough features. These problems are exacerbated by a lack of anomaly detection datasets that are good enough representatives of real-world scenarios. In this work, we analyze and quantify the characteristics of two well-known video anomaly datasets to better understand the difficulties of pose-based anomaly detection. We take a step forward, exploring the discriminating power of pose and trajectory for video anomaly detection and their effectiveness based on context. We believe these experiments are beneficial for a better comprehension of pose-based anomaly detection and the datasets currently available. This will aid researchers in tackling the task of anomaly detection with a more lucid perspective, accelerating the development of robust models with better performance.
Pishgu: Universal Path Prediction Architecture through Graph Isomorphism and Attentive Convolution
Oct 14, 2022
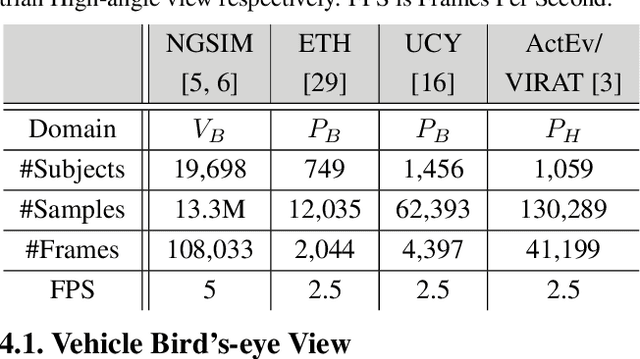
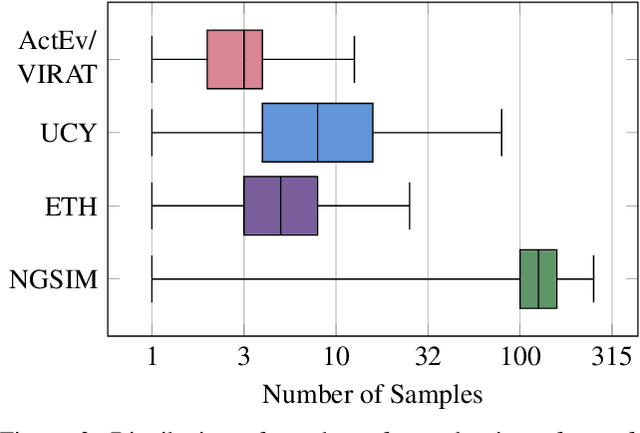
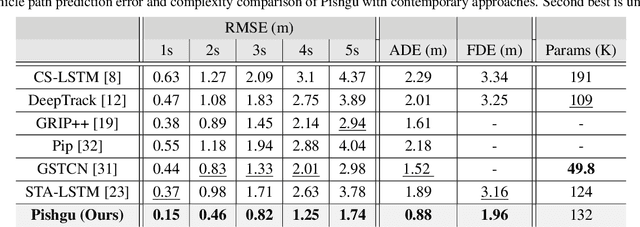
Path prediction is an essential task for several real-world real-time applications, from autonomous driving and video surveillance to environmental monitoring. Most existing approaches are computation-intensive and only target a narrow domain (e.g., a specific point of view for a particular subject). However, many real-time applications demand a universal path predictor that can work across different subjects (vehicles, pedestrians), perspectives (bird's-eye, high-angle), and scenes (sidewalk, highway). This article proposes Pishgu, a universal graph isomorphism approach for attentive path prediction that accounts for environmental challenges. Pishgu captures the inter-dependencies within the subjects in each frame by taking advantage of Graph Isomorphism Networks. In addition, an attention module is adopted to represent the intrinsic relations of the subjects of interest with their surroundings. We evaluate the adaptability of our approach to multiple publicly available vehicle (bird's-eye view) and pedestrian (bird's-eye and high-angle view) path prediction datasets. Pishgu's universal solution outperforms existing domain-focused methods by producing state-of-the-art results for vehicle bird's-eye view by 42% and 61% and pedestrian high-angle views by 23% and 22% in terms of ADE and FDE, respectively. Moreover, we analyze the domain-specific details for various datasets to understand their effect on path prediction and model interpretation. Although our model is a single solution for path prediction problems and defines a new standard in multiple domains, it still has a comparable complexity to state-of-the-art models, which makes it suitable for real-world application. We also report the latency and throughput for all three domains on multiple embedded processors.
DeepTrack: Lightweight Deep Learning for Vehicle Path Prediction in Highways
Aug 01, 2021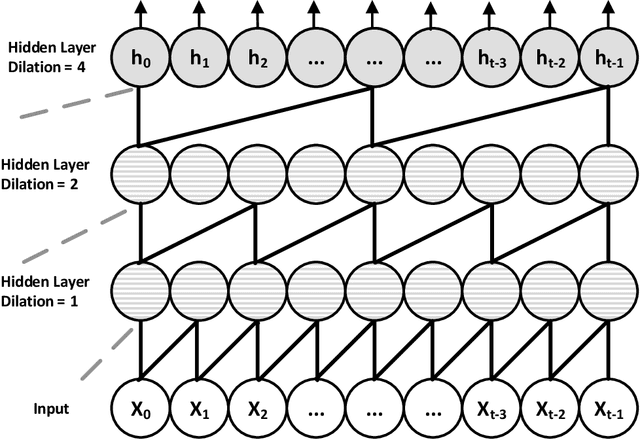
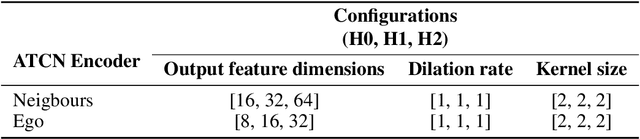
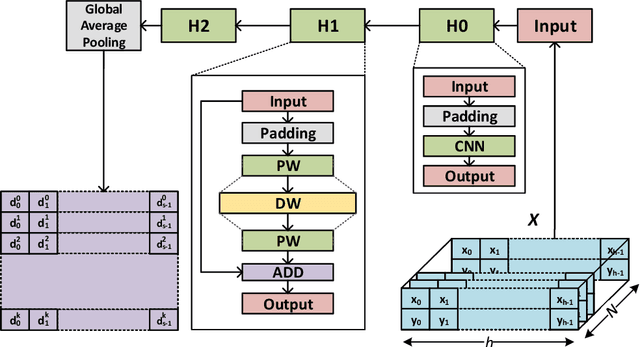
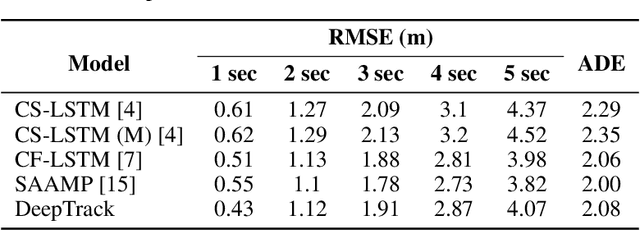
Vehicle trajectory prediction is an essential task for enabling many intelligent transportation systems. While there have been some promising advances in the field, there is a need for new agile algorithms with smaller model sizes and lower computational requirements. This article presents DeepTrack, a novel deep learning algorithm customized for real-time vehicle trajectory prediction in highways. In contrast to previous methods, the vehicle dynamics are encoded using Agile Temporal Convolutional Networks (ATCNs) to provide more robust time prediction with less computation. ATCN also uses depthwise convolution, which reduces the complexity of models compared to existing approaches in terms of model size and operations. Overall, our experimental results demonstrate that DeepTrack achieves comparable accuracy to state-of-the-art trajectory prediction models but with smaller model sizes and lower computational complexity, making it more suitable for real-world deployment.