 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-OCT-SelfNet: Integrating Self-Supervised Learning with Multi-Source Data Fusion for Enhanced Multi-Class Retinal Disease Classification
Sep 17, 2024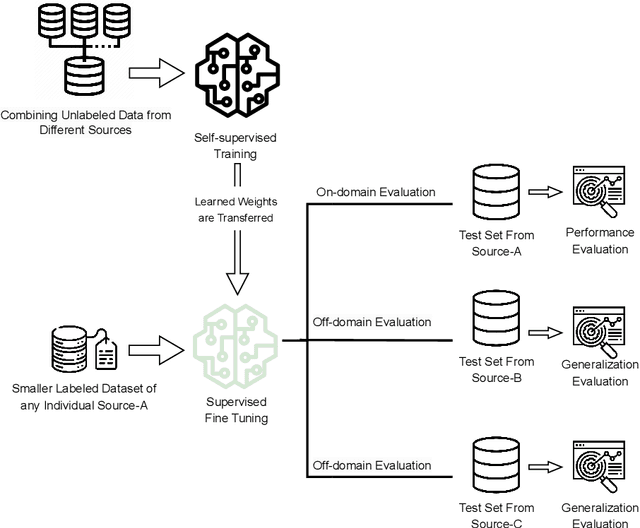
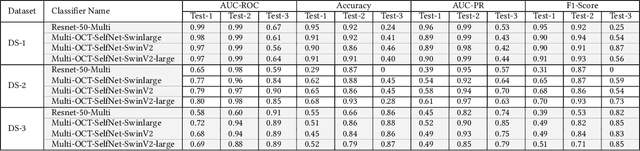
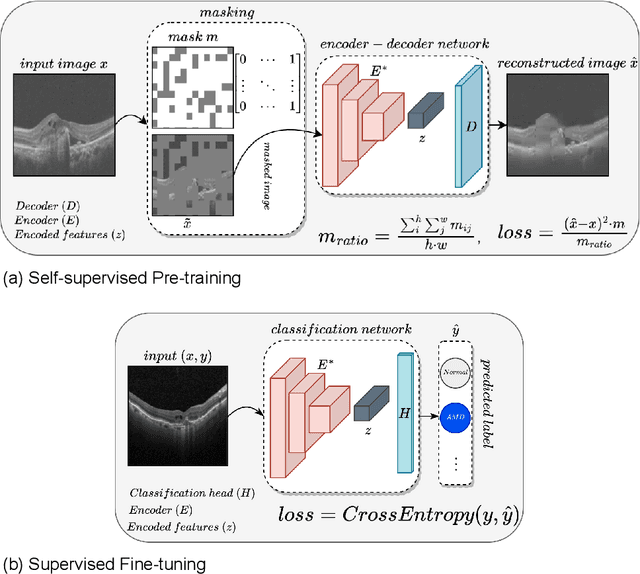
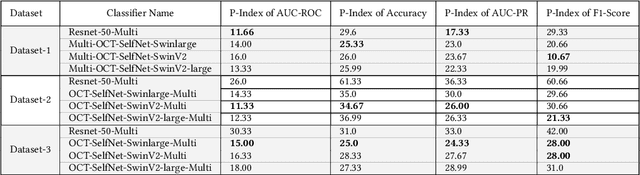
In the medical domain, acquiring large datasets poses significant challenges due to privacy concerns. Nonetheless, the development of a robust deep-learning model for retinal disease diagnosis necessitates a substantial dataset for training. The capacity to generalize effectively on smaller datasets remains a persistent challenge. The scarcity of data presents a significant barrier to the practical implementation of scalable medical AI solutions. To address this issue, we've combined a wide range of data sources to improve performance and generalization to new data by giving it a deeper understanding of the data representation from multi-modal datasets and developed a self-supervised framework based on large language models (LLMs), SwinV2 to gain a deeper understanding of multi-modal dataset representations, enhancing the model's ability to extrapolate to new data for the detection of eye diseases using optical coherence tomography (OCT) images. We adopt a two-phase training methodology, self-supervised pre-training, and fine-tuning on a downstream supervised classifier. An ablation study conducted across three datasets employing various encoder backbones, without data fusion, with low data availability setting, and without self-supervised pre-training scenarios, highlights the robustness of our method. Our findings demonstrate consistent performance across these diverse conditions, showcasing superior generalization capabilities compared to the baseline model, ResNet-50.
VegaEdge: Edge AI Confluence Anomaly Detection for Real-Time Highway IoT-Applications
Nov 14, 2023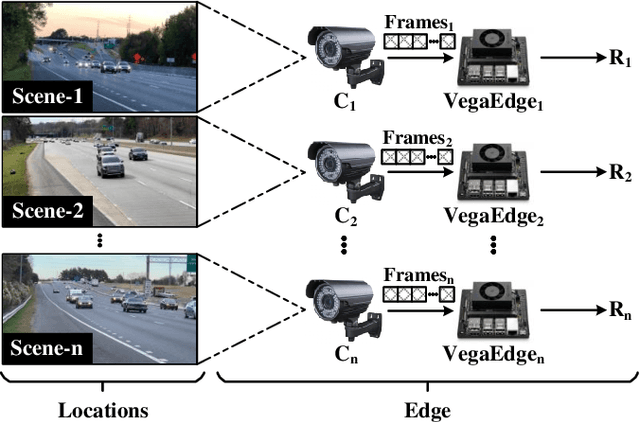
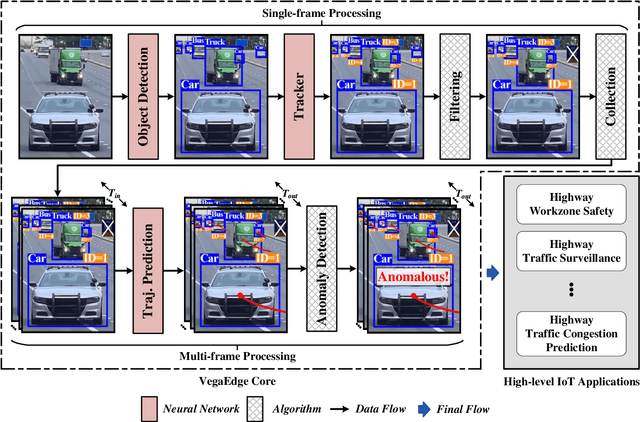
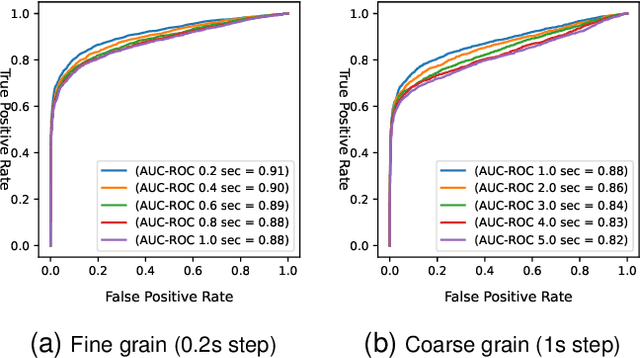
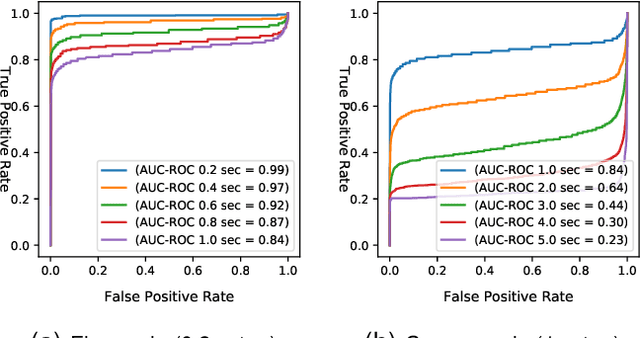
Vehicle anomaly detection plays a vital role in highway safety applications such as accident prevention, rapid response, traffic flow optimization, and work zone safety. With the surge of the Internet of Things (IoT) in recent years, there has arisen a pressing demand for Artificial Intelligence (AI) based anomaly detection methods designed to meet the requirements of IoT devices. Catering to this futuristic vision, we introduce a lightweight approach to vehicle anomaly detection by utilizing the power of trajectory prediction. Our proposed design identifies vehicles deviating from expected paths, indicating highway risks from different camera-viewing angles from real-world highway datasets. On top of that, we present VegaEdge - a sophisticated AI confluence designed for real-time security and surveillance applications in modern highway settings through edge-centric IoT-embedded platforms equipped with our anomaly detection approach. Extensive testing across multiple platforms and traffic scenarios showcases the versatility and effectiveness of VegaEdge. This work also presents the Carolinas Anomaly Dataset (CAD), to bridge the existing gap in datasets tailored for highway anomalies. In real-world scenarios, our anomaly detection approach achieves an AUC-ROC of 0.94, and our proposed VegaEdge design, on an embedded IoT platform, processes 738 trajectories per second in a typical highway setting. The dataset is available at https://github.com/TeCSAR-UNCC/Carolinas_Dataset#chd-anomaly-test-set .