 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePishgu: Universal Path Prediction Architecture through Graph Isomorphism and Attentive Convolution
Paper and Code
Oct 14, 2022
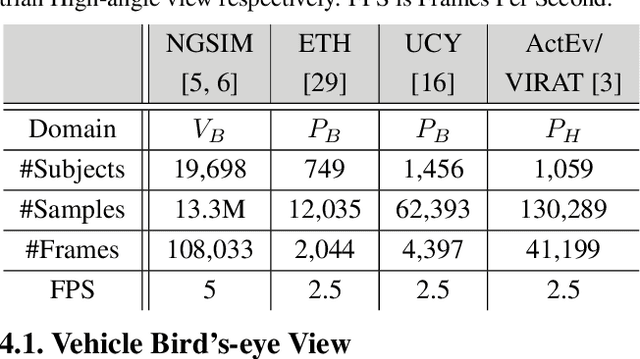
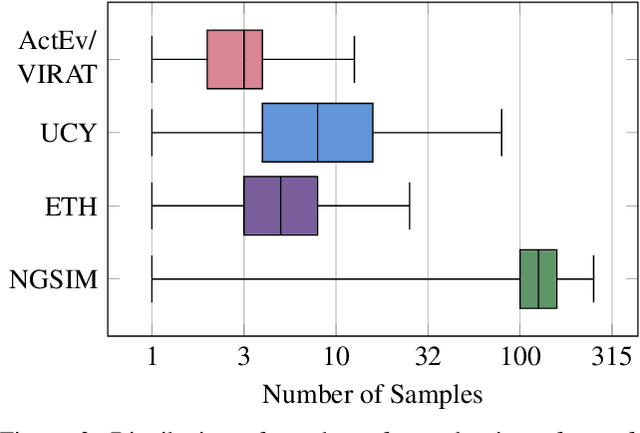
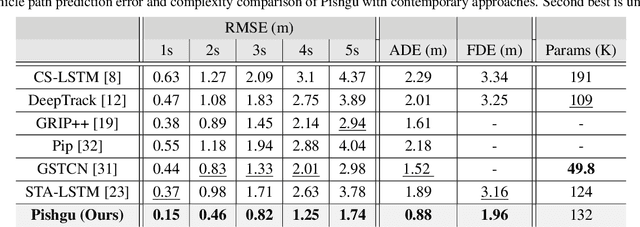
Path prediction is an essential task for several real-world real-time applications, from autonomous driving and video surveillance to environmental monitoring. Most existing approaches are computation-intensive and only target a narrow domain (e.g., a specific point of view for a particular subject). However, many real-time applications demand a universal path predictor that can work across different subjects (vehicles, pedestrians), perspectives (bird's-eye, high-angle), and scenes (sidewalk, highway). This article proposes Pishgu, a universal graph isomorphism approach for attentive path prediction that accounts for environmental challenges. Pishgu captures the inter-dependencies within the subjects in each frame by taking advantage of Graph Isomorphism Networks. In addition, an attention module is adopted to represent the intrinsic relations of the subjects of interest with their surroundings. We evaluate the adaptability of our approach to multiple publicly available vehicle (bird's-eye view) and pedestrian (bird's-eye and high-angle view) path prediction datasets. Pishgu's universal solution outperforms existing domain-focused methods by producing state-of-the-art results for vehicle bird's-eye view by 42% and 61% and pedestrian high-angle views by 23% and 22% in terms of ADE and FDE, respectively. Moreover, we analyze the domain-specific details for various datasets to understand their effect on path prediction and model interpretation. Although our model is a single solution for path prediction problems and defines a new standard in multiple domains, it still has a comparable complexity to state-of-the-art models, which makes it suitable for real-world application. We also report the latency and throughput for all three domains on multiple embedded processors.