 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Reality Warnings in Roadway Work Zones: Evaluating the Effect of Modality on Worker Reaction Times
Mar 29, 2024Given the aging highway infrastructure requiring extensive rebuilding and enhancements, and the consequent rise in the number of work zones, there is an urgent need to develop advanced safety systems to protect workers. While Augmented Reality (AR) holds significant potential for delivering warnings to workers, its integration into roadway work zones remains relatively unexplored. The primary objective of this study is to improve safety measures within roadway work zones by conducting an extensive analysis of how different combinations of multimodal AR warnings influence the reaction times of workers. This paper addresses this gap through a series of experiments that aim to replicate the distinctive conditions of roadway work zones, both in real-world and virtual reality environments. Our approach comprises three key components: an advanced AR system prototype, a VR simulation of AR functionality within the work zone environment, and the Wizard of Oz technique to synchronize user experiences across experiments. To assess reaction times, we leverage both the simple reaction time (SRT) technique and an innovative vision-based metric that utilizes real-time pose estimation. By conducting five experiments in controlled outdoor work zones and indoor VR settings, our study provides valuable information on how various multimodal AR warnings impact workers reaction times. Furthermore, our findings reveal the disparities in reaction times between VR simulations and real-world scenarios, thereby gauging VR's capability to mirror the dynamics of roadway work zones. Furthermore, our results substantiate the potential and reliability of vision-based reaction time measurements. These insights resonate well with those derived using the SRT technique, underscoring the viability of this approach for tangible real-world uses.
DeepTrack: Lightweight Deep Learning for Vehicle Path Prediction in Highways
Aug 01, 2021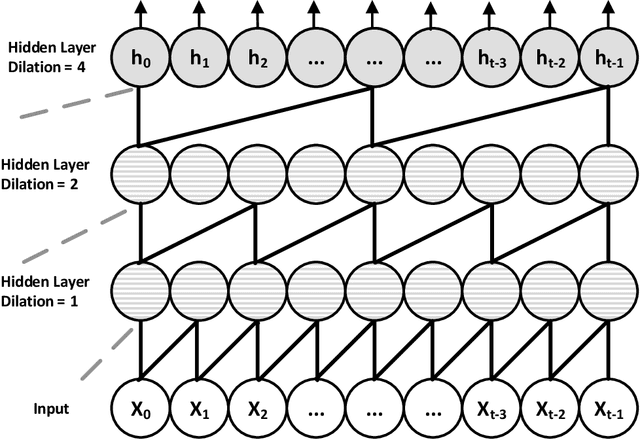
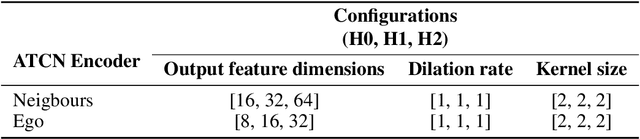
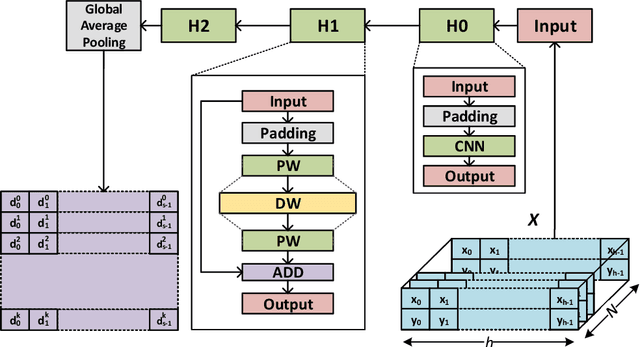
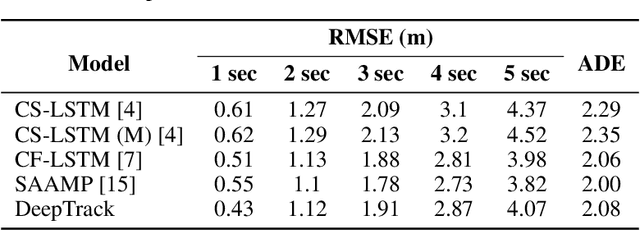
Vehicle trajectory prediction is an essential task for enabling many intelligent transportation systems. While there have been some promising advances in the field, there is a need for new agile algorithms with smaller model sizes and lower computational requirements. This article presents DeepTrack, a novel deep learning algorithm customized for real-time vehicle trajectory prediction in highways. In contrast to previous methods, the vehicle dynamics are encoded using Agile Temporal Convolutional Networks (ATCNs) to provide more robust time prediction with less computation. ATCN also uses depthwise convolution, which reduces the complexity of models compared to existing approaches in terms of model size and operations. Overall, our experimental results demonstrate that DeepTrack achieves comparable accuracy to state-of-the-art trajectory prediction models but with smaller model sizes and lower computational complexity, making it more suitable for real-world deployment.