 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVT-Former: A Transformer-based Vehicle Trajectory Prediction Approach For Intelligent Highway Transportation Systems
Paper and Code
Nov 11, 2023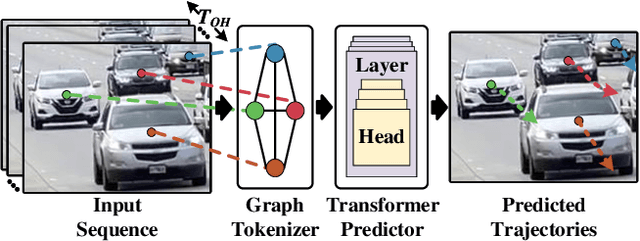
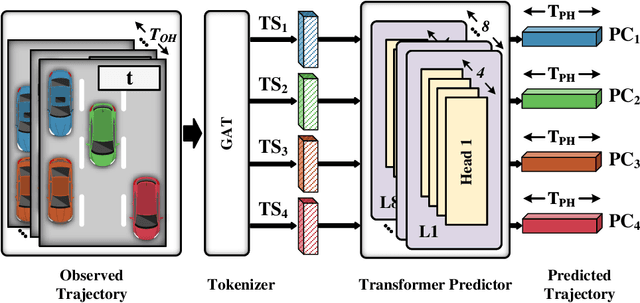

Enhancing roadway safety and traffic management has become an essential focus area for a broad range of modern cyber-physical systems and intelligent transportation systems. Vehicle Trajectory Prediction is a pivotal element within numerous applications for highway and road safety. These applications encompass a wide range of use cases, spanning from traffic management and accident prevention to enhancing work-zone safety and optimizing energy conservation. The ability to implement intelligent management in this context has been greatly advanced by the developments in the field of Artificial Intelligence (AI), alongside the increasing deployment of surveillance cameras across road networks. In this paper, we introduce a novel transformer-based approach for vehicle trajectory prediction for highway safety and surveillance, denoted as VT-Former. In addition to utilizing transformers to capture long-range temporal patterns, a new Graph Attentive Tokenization (GAT) module has been proposed to capture intricate social interactions among vehicles. Combining these two core components culminates in a precise approach for vehicle trajectory prediction. Our study on three benchmark datasets with three different viewpoints demonstrates the State-of-The-Art (SoTA) performance of VT-Former in vehicle trajectory prediction and its generalizability and robustness. We also evaluate VT-Former's efficiency on embedded boards and explore its potential for vehicle anomaly detection as a sample application, showcasing its broad applicability.