 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNL-Augmenter: A Framework for Task-Sensitive Natural Language Augmentation
Dec 06, 2021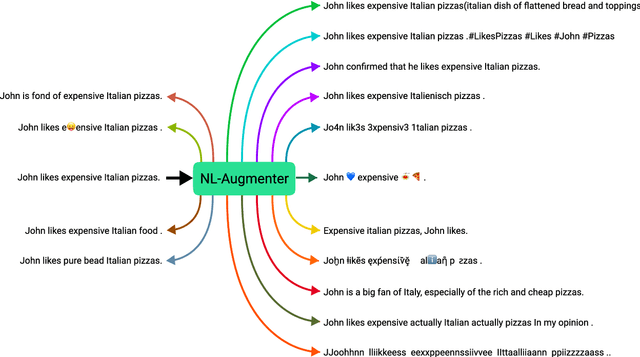
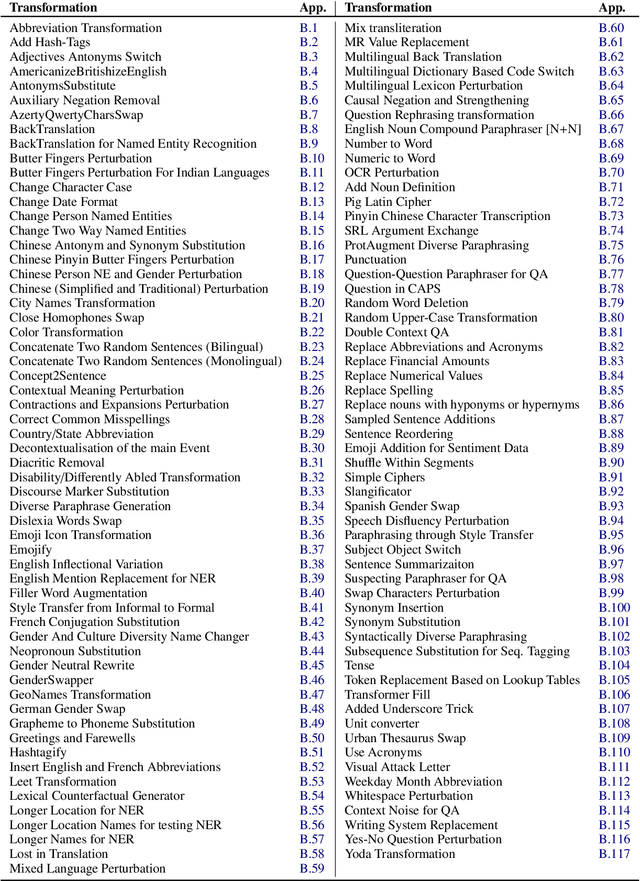
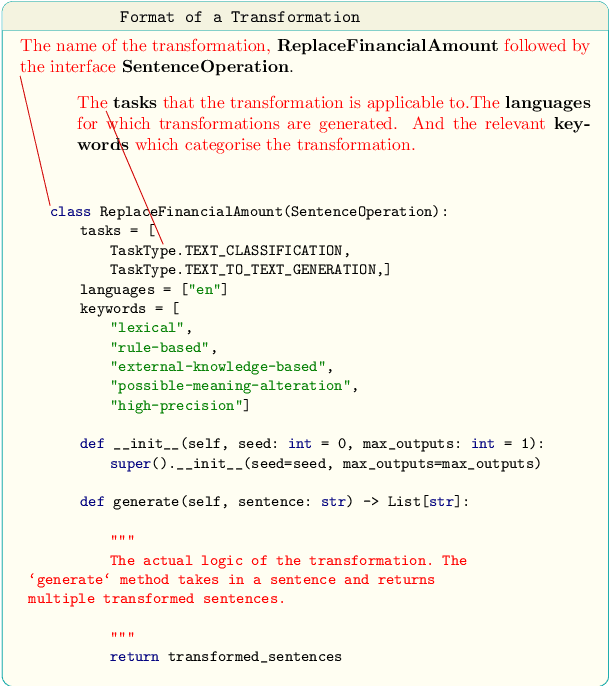
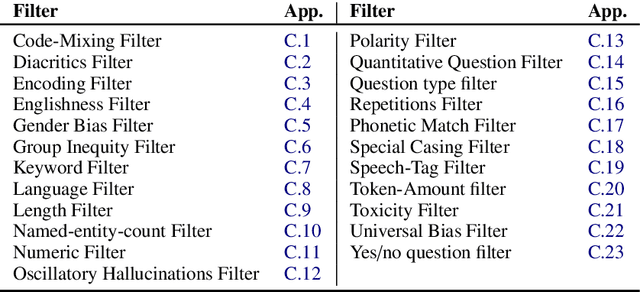
Data augmentation is an important component in the robustness evaluation of models in natural language processing (NLP) and in enhancing the diversity of the data they are trained on. In this paper, we present NL-Augmenter, a new participatory Python-based natural language augmentation framework which supports the creation of both transformations (modifications to the data) and filters (data splits according to specific features). We describe the framework and an initial set of 117 transformations and 23 filters for a variety of natural language tasks. We demonstrate the efficacy of NL-Augmenter by using several of its transformations to analyze the robustness of popular natural language models. The infrastructure, datacards and robustness analysis results are available publicly on the NL-Augmenter repository (\url{https://github.com/GEM-benchmark/NL-Augmenter}).
Binarized Neural Networks for Resource-Constrained On-Device Gait Identification
Mar 30, 2021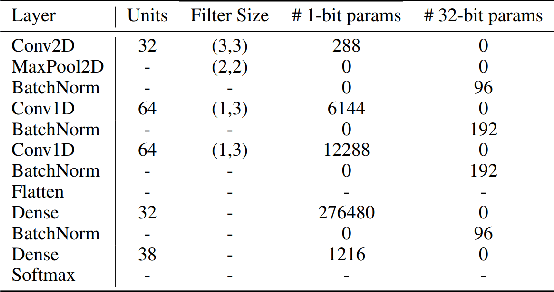
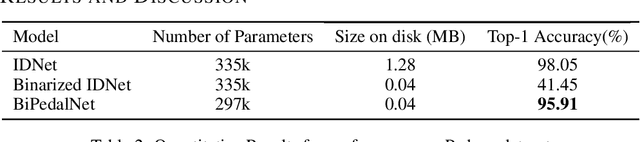
User authentication through gait analysis is a promising application of discriminative neural networks -- particularly due to the ubiquity of the primary sources of gait accelerometry, in-pocket cellphones. However, conventional machine learning models are often too large and computationally expensive to enable inference on low-resource mobile devices. We propose that binarized neural networks can act as robust discriminators, maintaining both an acceptable level of accuracy while also dramatically decreasing memory requirements, thereby enabling on-device inference. To this end, we propose BiPedalNet, a compact CNN that nearly matches the state-of-the-art on the Padova gait dataset, with only 1/32 of the memory overhead.
Rotation-Invariant Gait Identification with Quaternion Convolutional Neural Networks
Aug 04, 2020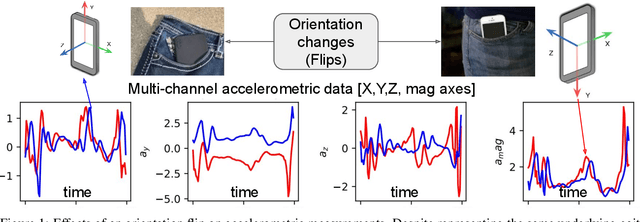
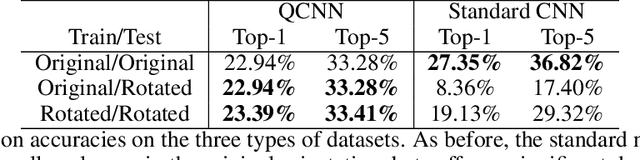
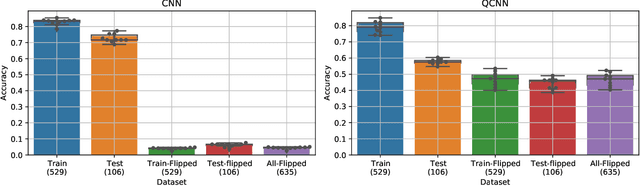
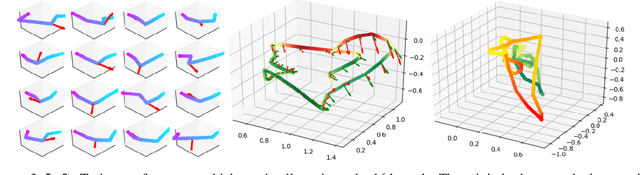
A desireable property of accelerometric gait-based identification systems is robustness to new device orientations presented by users during testing but unseen during the training phase. However, traditional Convolutional neural networks (CNNs) used in these systems compensate poorly for such transformations. In this paper, we target this problem by introducing Quaternion CNN, a network architecture which is intrinsically layer-wise equivariant and globally invariant under 3D rotations of an array of input vectors. We show empirically that this network indeed significantly outperforms a traditional CNN in a multi-user rotation-invariant gait classification setting .Lastly, we demonstrate how the kernels learned by this QCNN can also be visualized as basis-independent but origin- and chirality-dependent trajectory fragments in the euclidean space, thus yielding a novel mode of feature visualization and extraction.