 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotation-Invariant Gait Identification with Quaternion Convolutional Neural Networks
Paper and Code
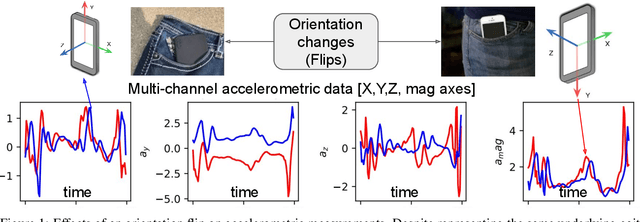
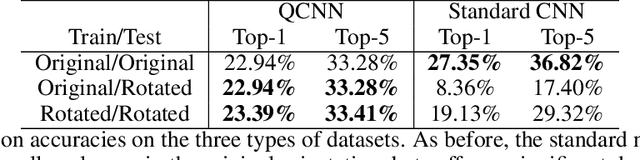
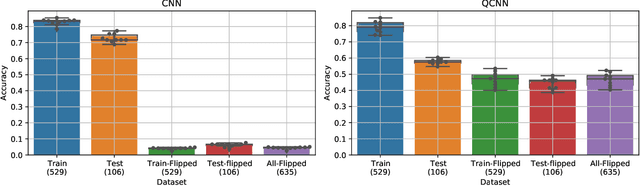
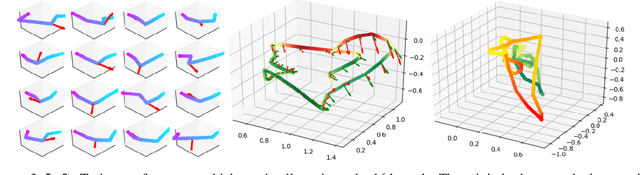
A desireable property of accelerometric gait-based identification systems is robustness to new device orientations presented by users during testing but unseen during the training phase. However, traditional Convolutional neural networks (CNNs) used in these systems compensate poorly for such transformations. In this paper, we target this problem by introducing Quaternion CNN, a network architecture which is intrinsically layer-wise equivariant and globally invariant under 3D rotations of an array of input vectors. We show empirically that this network indeed significantly outperforms a traditional CNN in a multi-user rotation-invariant gait classification setting .Lastly, we demonstrate how the kernels learned by this QCNN can also be visualized as basis-independent but origin- and chirality-dependent trajectory fragments in the euclidean space, thus yielding a novel mode of feature visualization and extraction.