 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Grid Mapping for Moving Object Tracking Evaluation
Nov 17, 2023


Perception of other road users is a crucial task for intelligent vehicles. Perception systems can use on-board sensors only or be in cooperation with other vehicles or with roadside units. In any case, the performance of perception systems has to be evaluated against ground-truth data, which is a particularly tedious task and requires numerous manual operations. In this article, we propose a novel semi-automatic method for pseudo ground-truth estimation. The principle consists in carrying out experiments with several vehicles equipped with LiDAR sensors and with fixed perception systems located at the roadside in order to collaboratively build reference dynamic data. The method is based on grid mapping and in particular on the elaboration of a background map that holds relevant information that remains valid during a whole dataset sequence. Data from all agents is converted in time-stamped observations grids. A data fusion method that manages uncertainties combines the background map with observations to produce dynamic reference information at each instant. Several datasets have been acquired with three experimental vehicles and a roadside unit. An evaluation of this method is finally provided in comparison to a handmade ground truth.
Efficient exact computation of the conjunctive and disjunctive decompositions of D-S Theory for information fusion: Translation and extension
Jul 13, 2021Dempster-Shafer Theory (DST) generalizes Bayesian probability theory, offering useful additional information, but suffers from a high computational burden. A lot of work has been done to reduce the complexity of computations used in information fusion with Dempster's rule. Yet, few research had been conducted to reduce the complexity of computations for the conjunctive and disjunctive decompositions of evidence, which are at the core of other important methods of information fusion. In this paper, we propose a method designed to exploit the actual evidence (information) contained in these decompositions in order to compute them. It is based on a new notion that we call focal point, derived from the notion of focal set. With it, we are able to reduce these computations up to a linear complexity in the number of focal sets in some cases. In a broader perspective, our formulas have the potential to be tractable when the size of the frame of discernment exceeds a few dozen possible states, contrary to the existing litterature. This article extends (and translates) our work published at the french conference GRETSI in 2019.
Focal points and their implications for Möbius Transforms and Dempster-Shafer Theory
Dec 05, 2020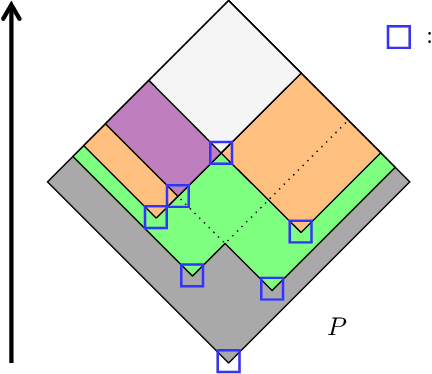

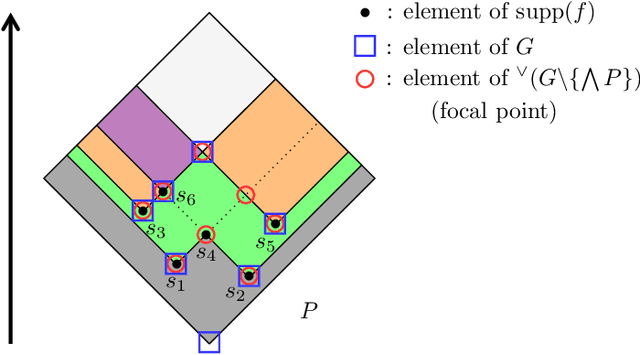
Dempster-Shafer Theory (DST) generalizes Bayesian probability theory, offering useful additional information, but suffers from a much higher computational burden. A lot of work has been done to reduce the time complexity of information fusion with Dempster's rule, which is a pointwise multiplication of two zeta transforms, and optimal general algorithms have been found to get the complete definition of these transforms. Yet, it is shown in this paper that the zeta transform and its inverse, the M\"obius transform, can be exactly simplified, fitting the quantity of information contained in belief functions. Beyond that, this simplification actually works for any function on any partially ordered set. It relies on a new notion that we call focal point and that constitutes the smallest domain on which both the zeta and M\"obius transforms can be defined. We demonstrate the interest of these general results for DST, not only for the reduction in complexity of most transformations between belief representations and their fusion, but also for theoretical purposes. Indeed, we provide a new generalization of the conjunctive decomposition of evidence and formulas uncovering how each decomposition weight is tied to the corresponding mass function.
Enhancing Mobile Object Classification Using Geo-referenced Maps and Evidential Grids
Jan 22, 2014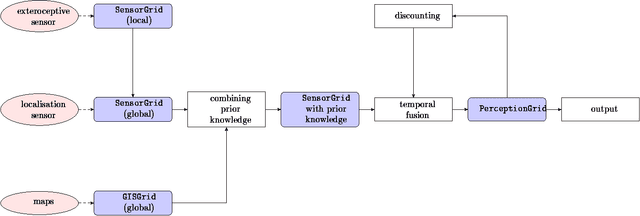
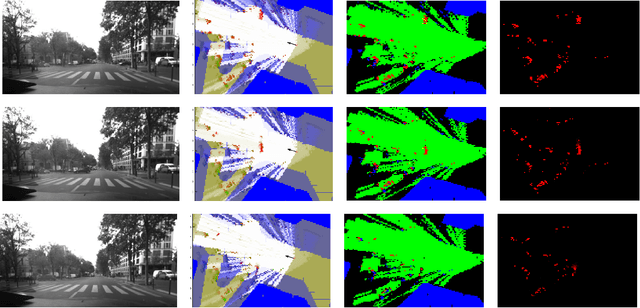
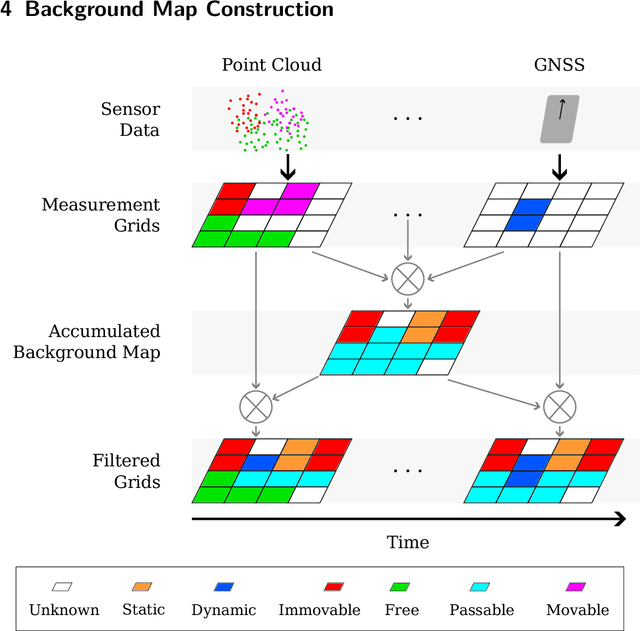
Evidential grids have recently shown interesting properties for mobile object perception. Evidential grids are a generalisation of Bayesian occupancy grids using Dempster- Shafer theory. In particular, these grids can handle efficiently partial information. The novelty of this article is to propose a perception scheme enhanced by geo-referenced maps used as an additional source of information, which is fused with a sensor grid. The paper presents the key stages of such a data fusion process. An adaptation of conjunctive combination rule is presented to refine the analysis of the conflicting information. The method uses temporal accumulation to make the distinction between stationary and mobile objects, and applies contextual discounting for modelling information obsolescence. As a result, the method is able to better characterise the occupied cells by differentiating, for instance, moving objects, parked cars, urban infrastructure and buildings. Experiments carried out on real- world data illustrate the benefits of such an approach.
* 6 pp. arXiv admin note: substantial text overlap with arXiv:1207.1016
Conservative, Proportional and Optimistic Contextual Discounting in the Belief Functions Theory
Dec 19, 2013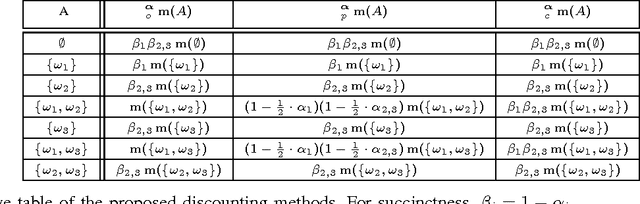
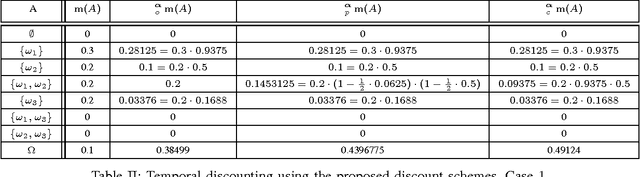
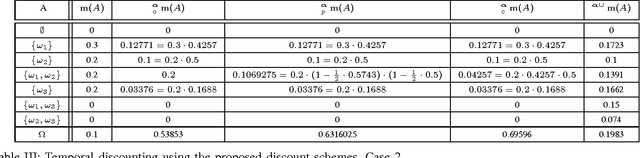
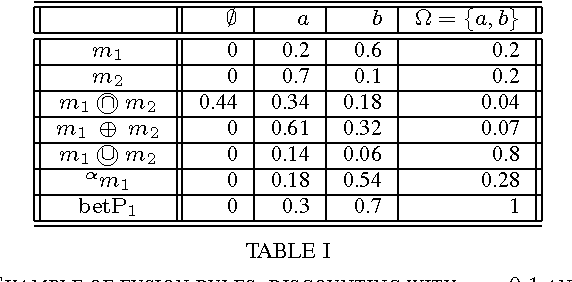
Information discounting plays an important role in the theory of belief functions and, generally, in information fusion. Nevertheless, neither classical uniform discounting nor contextual cannot model certain use cases, notably temporal discounting. In this article, new contextual discounting schemes, conservative, proportional and optimistic, are proposed. Some properties of these discounting operations are examined. Classical discounting is shown to be a special case of these schemes. Two motivating cases are discussed: modelling of source reliability and application to temporal discounting.
* 7 pages
DAARIA: Driver Assistance by Augmented Reality for Intelligent Automobile
Sep 27, 2012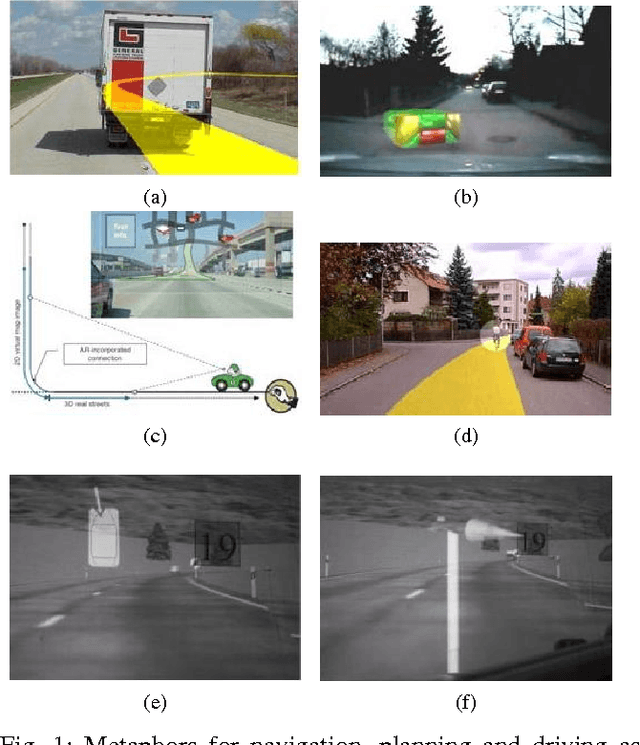
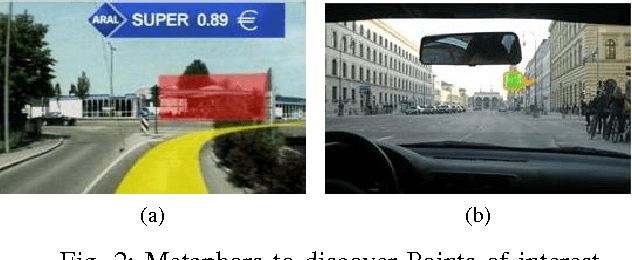


Taking into account the drivers' state is a major challenge for designing new advanced driver assistance systems. In this paper we present a driver assistance system strongly coupled to the user. DAARIA 1 stands for Driver Assistance by Augmented Reality for Intelligent Automobile. It is an augmented reality interface powered by several sensors. The detection has two goals: one is the position of obstacles and the quantification of the danger represented by them. The other is the driver's behavior. A suitable visualization metaphor allows the driver to perceive at any time the location of the relevant hazards while keeping his eyes on the road. First results show that our method could be applied to a vehicle but also to aerospace, fluvial or maritime navigation.
Map-aided Fusion Using Evidential Grids for Mobile Perception in Urban Environment
Jul 04, 2012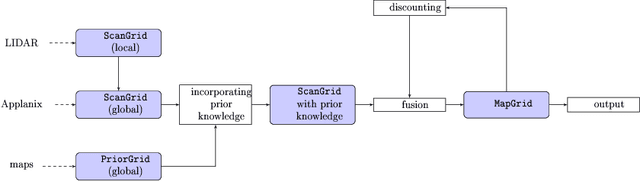
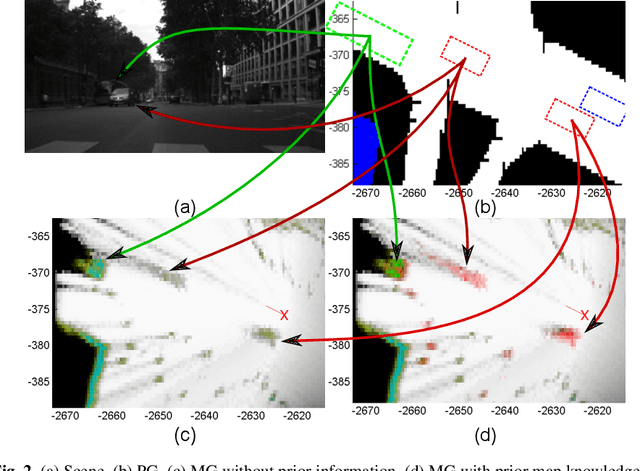
Evidential grids have been recently used for mobile object perception. The novelty of this article is to propose a perception scheme using prior map knowledge. A geographic map is considered an additional source of information fused with a grid representing sensor data. Yager's rule is adapted to exploit the Dempster-Shafer conflict information at large. In order to distinguish stationary and mobile objects, a counter is introduced and used as a factor for mass function specialisation. Contextual discounting is used, since we assume that different pieces of information become obsolete at different rates. Tests on real-world data are also presented.