 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Image Annotation for Mapped Features Detection
Dec 11, 2024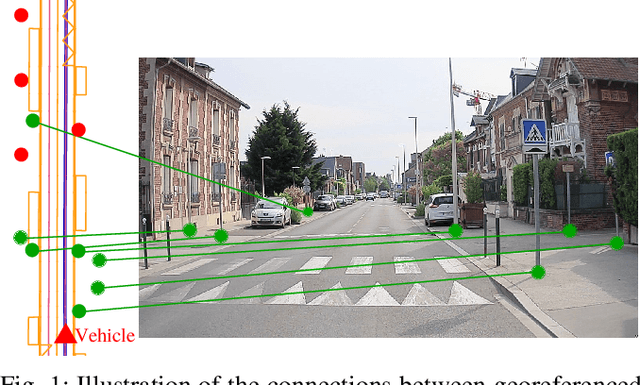
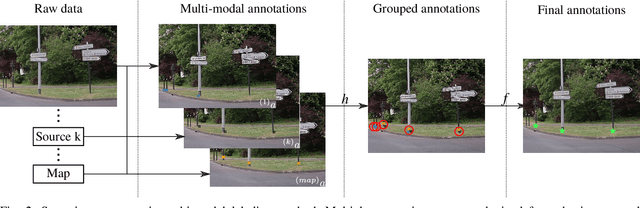
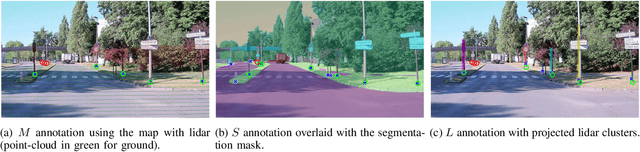
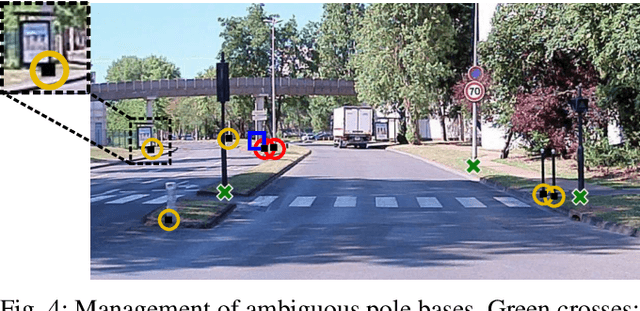
Detecting road features is a key enabler for autonomous driving and localization. For instance, a reliable detection of poles which are widespread in road environments can improve localization. Modern deep learning-based perception systems need a significant amount of annotated data. Automatic annotation avoids time-consuming and costly manual annotation. Because automatic methods are prone to errors, managing annotation uncertainty is crucial to ensure a proper learning process. Fusing multiple annotation sources on the same dataset can be an efficient way to reduce the errors. This not only improves the quality of annotations, but also improves the learning of perception models. In this paper, we consider the fusion of three automatic annotation methods in images: feature projection from a high accuracy vector map combined with a lidar, image segmentation and lidar segmentation. Our experimental results demonstrate the significant benefits of multi-modal automatic annotation for pole detection through a comparative evaluation on manually annotated images. Finally, the resulting multi-modal fusion is used to fine-tune an object detection model for pole base detection using unlabeled data, showing overall improvements achieved by enhancing network specialization. The dataset is publicly available.
Pole-based Vehicle Localization with Vector Maps: A Camera-LiDAR Comparative Study
Dec 11, 2024



For autonomous navigation, accurate localization with respect to a map is needed. In urban environments, infrastructure such as buildings or bridges cause major difficulties to Global Navigation Satellite Systems (GNSS) and, despite advances in inertial navigation, it is necessary to support them with other sources of exteroceptive information. In road environments, many common furniture such as traffic signs, traffic lights and street lights take the form of poles. By georeferencing these features in vector maps, they can be used within a localization filter that includes a detection pipeline and a data association method. Poles, having discriminative vertical structures, can be extracted from 3D geometric information using LiDAR sensors. Alternatively, deep neural networks can be employed to detect them from monocular cameras. The lack of depth information induces challenges in associating camera detections with map features. Yet, multi-camera integration provides a cost-efficient solution. This paper quantitatively evaluates the efficacy of these approaches in terms of localization. It introduces a real-time method for camera-based pole detection using a lightweight neural network trained on automatically annotated images. The proposed methods' efficiency is assessed on a challenging sequence with a vector map. The results highlight the high accuracy of the vision-based approach in open road conditions.
Collaborative Grid Mapping for Moving Object Tracking Evaluation
Nov 17, 2023
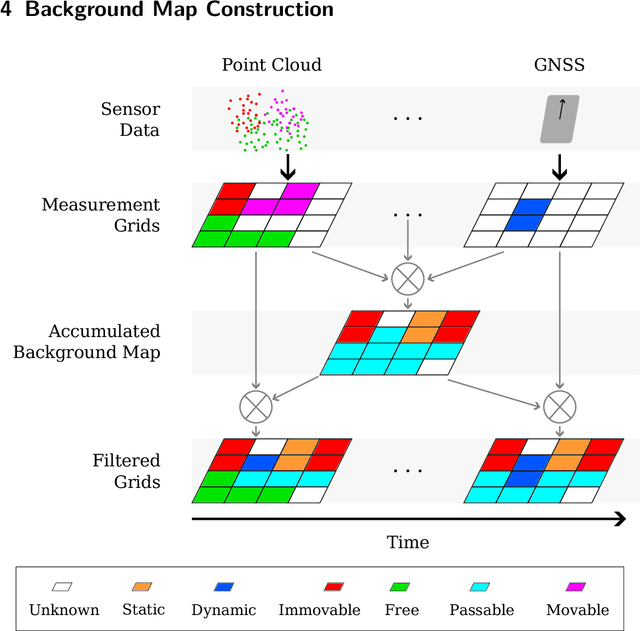


Perception of other road users is a crucial task for intelligent vehicles. Perception systems can use on-board sensors only or be in cooperation with other vehicles or with roadside units. In any case, the performance of perception systems has to be evaluated against ground-truth data, which is a particularly tedious task and requires numerous manual operations. In this article, we propose a novel semi-automatic method for pseudo ground-truth estimation. The principle consists in carrying out experiments with several vehicles equipped with LiDAR sensors and with fixed perception systems located at the roadside in order to collaboratively build reference dynamic data. The method is based on grid mapping and in particular on the elaboration of a background map that holds relevant information that remains valid during a whole dataset sequence. Data from all agents is converted in time-stamped observations grids. A data fusion method that manages uncertainties combines the background map with observations to produce dynamic reference information at each instant. Several datasets have been acquired with three experimental vehicles and a roadside unit. An evaluation of this method is finally provided in comparison to a handmade ground truth.
Lane level context and hidden space characterization for autonomous driving
Aug 31, 2021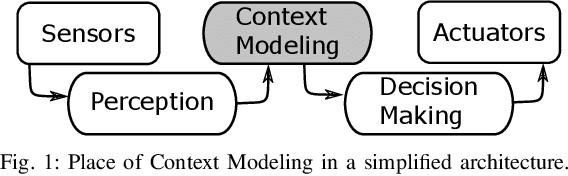

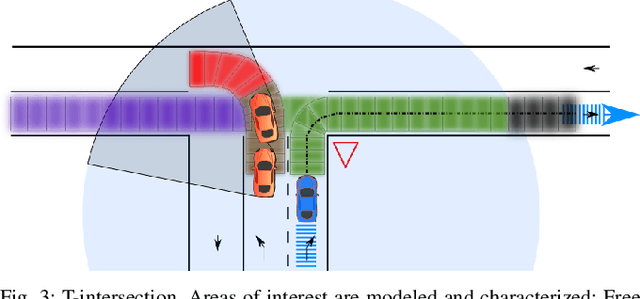
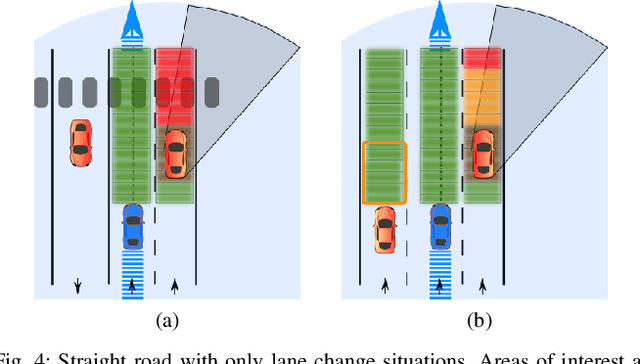
For an autonomous vehicle, situation understand-ing is a key capability towards safe and comfortable decision-making and navigation. Information is in general provided bymultiple sources. Prior information about the road topology andtraffic laws can be given by a High Definition (HD) map whilethe perception system provides the description of the spaceand of road entities evolving in the vehicle surroundings. Incomplex situations such as those encountered in urban areas,the road user behaviors are governed by strong interactionswith the others, and with the road network. In such situations,reliable situation understanding is therefore mandatory to avoidinappropriate decisions. Nevertheless, situation understandingis a complex task that requires access to a consistent andnon-misleading representation of the vehicle surroundings. Thispaper proposes a formalism (an interaction lane grid) whichallows to represent, with different levels of abstraction, thenavigable and interacting spaces which must be considered forsafe navigation. A top-down approach is chosen to assess andcharacterize the relevant information of the situation. On a highlevel of abstraction, the identification of the areas of interestwhere the vehicle should pay attention is depicted. On a lowerlevel, it enables to characterize the spatial information in aunified representation and to infer additional information inoccluded areas by reasoning with dynamic objects.
Enhancing Mobile Object Classification Using Geo-referenced Maps and Evidential Grids
Jan 22, 2014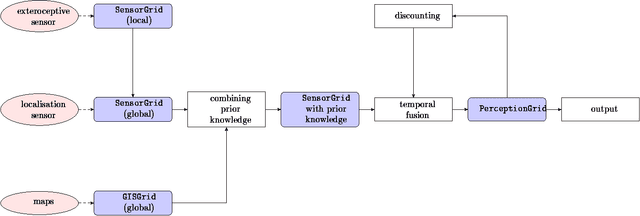
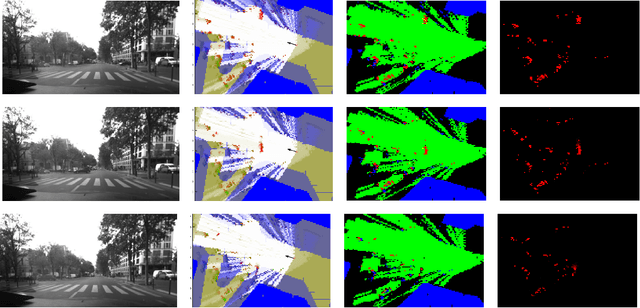
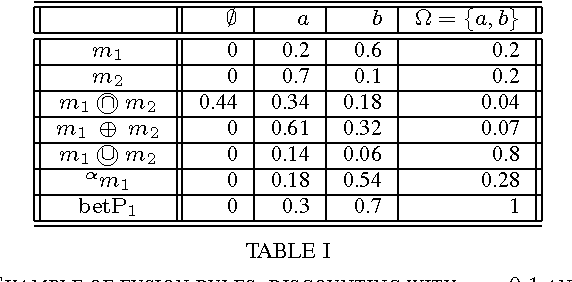
Evidential grids have recently shown interesting properties for mobile object perception. Evidential grids are a generalisation of Bayesian occupancy grids using Dempster- Shafer theory. In particular, these grids can handle efficiently partial information. The novelty of this article is to propose a perception scheme enhanced by geo-referenced maps used as an additional source of information, which is fused with a sensor grid. The paper presents the key stages of such a data fusion process. An adaptation of conjunctive combination rule is presented to refine the analysis of the conflicting information. The method uses temporal accumulation to make the distinction between stationary and mobile objects, and applies contextual discounting for modelling information obsolescence. As a result, the method is able to better characterise the occupied cells by differentiating, for instance, moving objects, parked cars, urban infrastructure and buildings. Experiments carried out on real- world data illustrate the benefits of such an approach.
* 6 pp. arXiv admin note: substantial text overlap with arXiv:1207.1016
Map-aided Fusion Using Evidential Grids for Mobile Perception in Urban Environment
Jul 04, 2012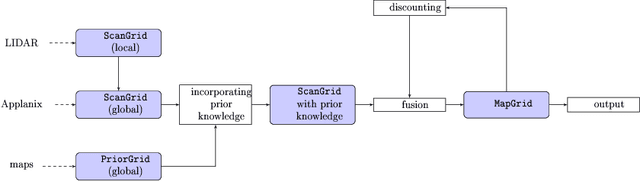
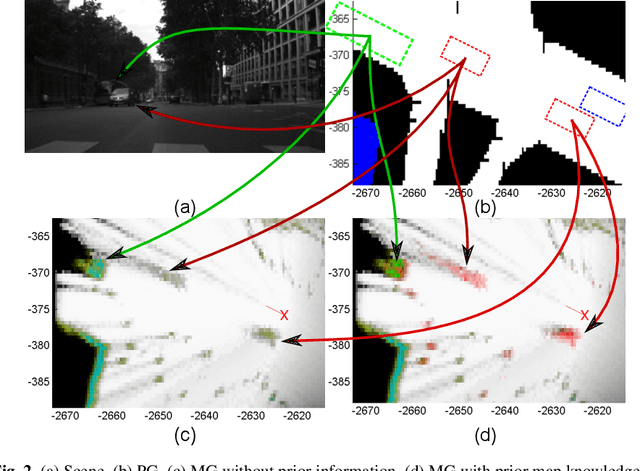
Evidential grids have been recently used for mobile object perception. The novelty of this article is to propose a perception scheme using prior map knowledge. A geographic map is considered an additional source of information fused with a grid representing sensor data. Yager's rule is adapted to exploit the Dempster-Shafer conflict information at large. In order to distinguish stationary and mobile objects, a counter is introduced and used as a factor for mass function specialisation. Contextual discounting is used, since we assume that different pieces of information become obsolete at different rates. Tests on real-world data are also presented.