 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Mobile Object Classification Using Geo-referenced Maps and Evidential Grids
Paper and Code
Jan 22, 2014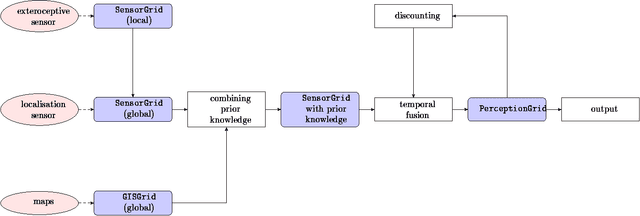
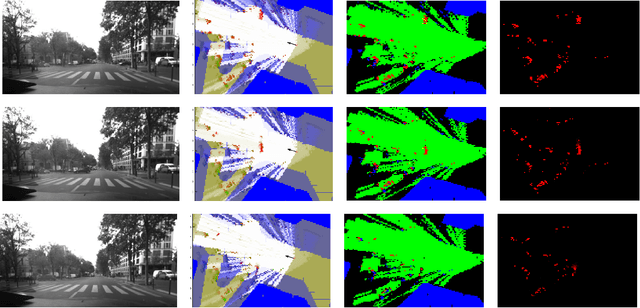
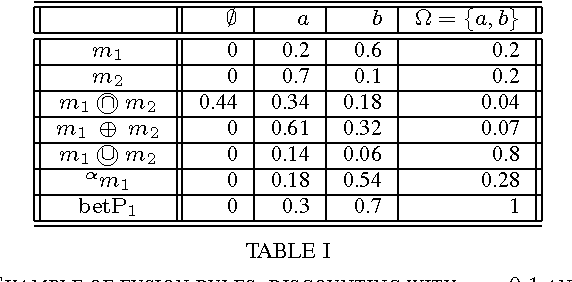
Evidential grids have recently shown interesting properties for mobile object perception. Evidential grids are a generalisation of Bayesian occupancy grids using Dempster- Shafer theory. In particular, these grids can handle efficiently partial information. The novelty of this article is to propose a perception scheme enhanced by geo-referenced maps used as an additional source of information, which is fused with a sensor grid. The paper presents the key stages of such a data fusion process. An adaptation of conjunctive combination rule is presented to refine the analysis of the conflicting information. The method uses temporal accumulation to make the distinction between stationary and mobile objects, and applies contextual discounting for modelling information obsolescence. As a result, the method is able to better characterise the occupied cells by differentiating, for instance, moving objects, parked cars, urban infrastructure and buildings. Experiments carried out on real- world data illustrate the benefits of such an approach.