 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Road Surface 3D Reconstruction and Pothole Detection: From Perspective Transformation to Disparity Map Segmentation
Dec 31, 2020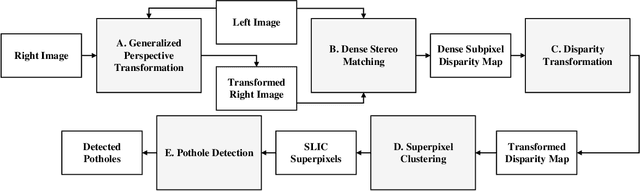
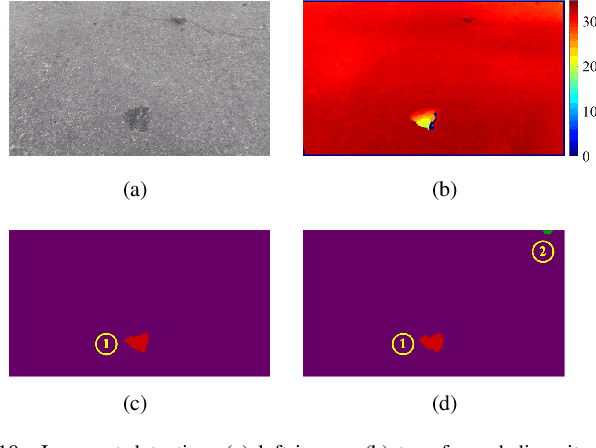
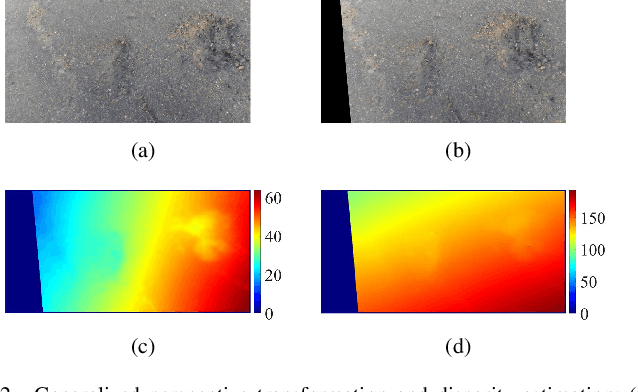
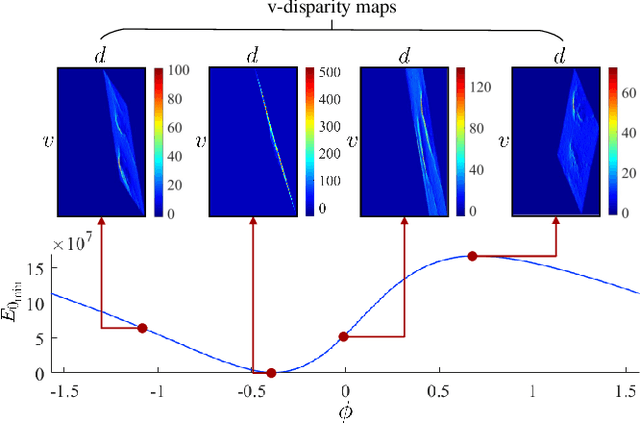
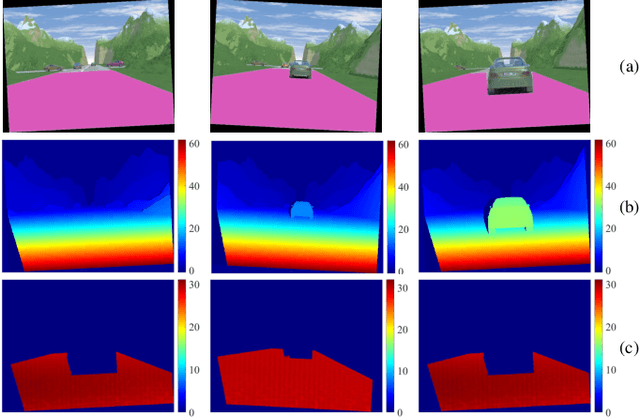
Potholes are one of the most common forms of road damage, which can severely affect driving comfort, road safety and vehicle condition. Pothole detection is typically performed by either structural engineers or certified inspectors. This task is, however, not only hazardous for the personnel but also extremely time-consuming. This paper presents an efficient pothole detection algorithm based on road disparity map estimation and segmentation. We first generalize the perspective transformation by incorporating the stereo rig roll angle. The road disparities are then estimated using semi-global matching. A disparity map transformation algorithm is then performed to better distinguish the damaged road areas. Finally, we utilize simple linear iterative clustering to group the transformed disparities into a collection of superpixels. The potholes are then detected by finding the superpixels, whose values are lower than an adaptively determined threshold. The proposed algorithm is implemented on an NVIDIA RTX 2080 Ti GPU in CUDA. The experiments demonstrate the accuracy and efficiency of our proposed road pothole detection algorithm, where an accuracy of 99.6% and an F-score of 89.4% are achieved.
Robust Lane Marking Detection Algorithm Using Drivable Area Segmentation and Extended SLT
Nov 20, 2019
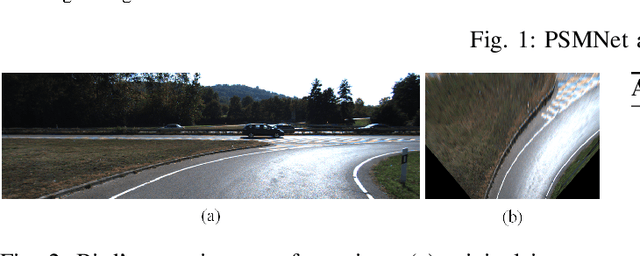
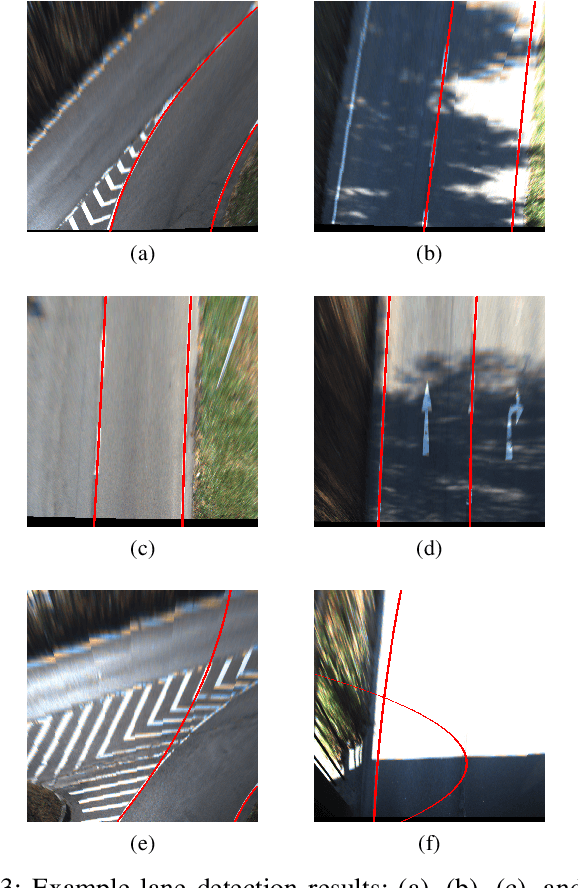
In this paper, a robust lane detection algorithm is proposed, where the vertical road profile of the road is estimated using dynamic programming from the v-disparity map and, based on the estimated profile, the road area is segmented. Since the lane markings are on the road area and any feature point above the ground will be a noise source for the lane detection, a mask is created for the road area to remove some of the noise for lane detection. The estimated mask is multiplied by the lane feature map in a bird's eye view (BEV). The lane feature points are extracted by using an extended version of symmetrical local threshold (SLT), which not only considers dark light dark transition (DLD) of the lane markings, like (SLT), but also considers parallelism on the lane marking borders. The segmentation then uses only the feature points that are on the road area. A maximum of two linear lane markings are detected using an efficient 1D Hough transform. Then, the detected linear lane markings are used to create a region of interest (ROI) for parabolic lane detection. Finally, based on the estimated region of interest, parabolic lane models are fitted using robust fitting. Due to the robust lane feature extraction and road area segmentation, the proposed algorithm robustly detects lane markings and achieves lane marking detection with an accuracy of 91% when tested on a sequence from the KITTI dataset.
Pothole Detection Based on Disparity Transformation and Road Surface Modeling
Aug 02, 2019


Pothole detection is one of the most important tasks for road maintenance. Computer vision approaches are generally based on either 2D road image analysis or 3D road surface modeling. However, these two categories are always used independently. Furthermore, the pothole detection accuracy is still far from satisfactory. Therefore, in this paper, we present a robust pothole detection algorithm that is both accurate and computationally efficient. A dense disparity map is first transformed to better distinguish between damaged and undamaged road areas. To achieve greater disparity transformation efficiency, golden section search and dynamic programming are utilized to estimate the transformation parameters. Otsu's thresholding method is then used to extract potential undamaged road areas from the transformed disparity map. The disparities in the extracted areas are modeled by a quadratic surface using least squares fitting. To improve disparity map modeling robustness, the surface normal is also integrated into the surface modeling process. Furthermore, random sample consensus is utilized to reduce the effects caused by outliers. By comparing the difference between the actual and modeled disparity maps, the potholes can be detected accurately. Finally, the point clouds of the detected potholes are extracted from the reconstructed 3D road surface. The experimental results show that the successful detection accuracy of the proposed system is around 98.7% and the overall pixel-level accuracy is approximately 99.6%.