 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Scale Feature Fusion: Learning Better Semantic Segmentation for Road Pothole Detection
Dec 24, 2021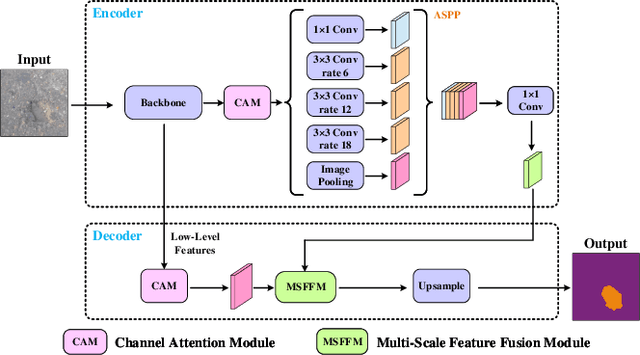
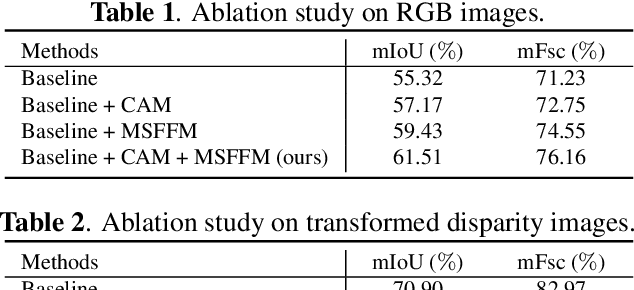
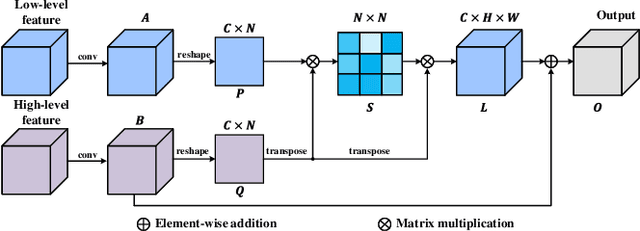
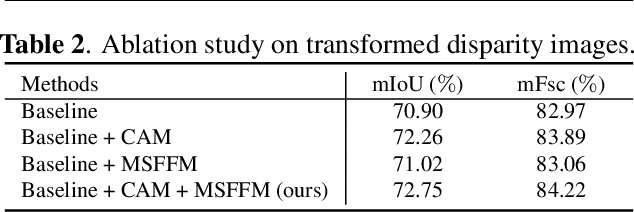
This paper presents a novel pothole detection approach based on single-modal semantic segmentation. It first extracts visual features from input images using a convolutional neural network. A channel attention module then reweighs the channel features to enhance the consistency of different feature maps. Subsequently, we employ an atrous spatial pyramid pooling module (comprising of atrous convolutions in series, with progressive rates of dilation) to integrate the spatial context information. This helps better distinguish between potholes and undamaged road areas. Finally, the feature maps in the adjacent layers are fused using our proposed multi-scale feature fusion module. This further reduces the semantic gap between different feature channel layers. Extensive experiments were carried out on the Pothole-600 dataset to demonstrate the effectiveness of our proposed method. The quantitative comparisons suggest that our method achieves the state-of-the-art (SoTA) performance on both RGB images and transformed disparity images, outperforming three SoTA single-modal semantic segmentation networks.
Pothole Detection Based on Disparity Transformation and Road Surface Modeling
Aug 02, 2019

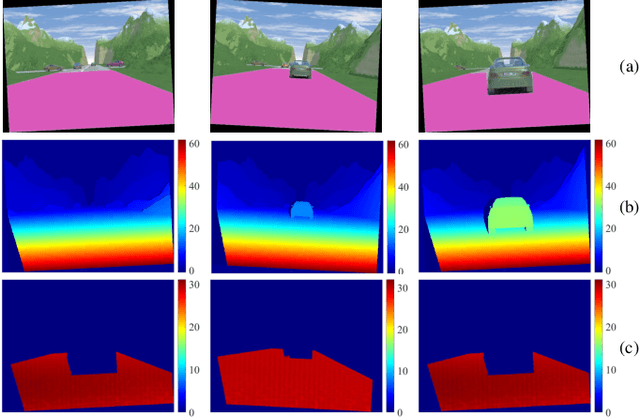

Pothole detection is one of the most important tasks for road maintenance. Computer vision approaches are generally based on either 2D road image analysis or 3D road surface modeling. However, these two categories are always used independently. Furthermore, the pothole detection accuracy is still far from satisfactory. Therefore, in this paper, we present a robust pothole detection algorithm that is both accurate and computationally efficient. A dense disparity map is first transformed to better distinguish between damaged and undamaged road areas. To achieve greater disparity transformation efficiency, golden section search and dynamic programming are utilized to estimate the transformation parameters. Otsu's thresholding method is then used to extract potential undamaged road areas from the transformed disparity map. The disparities in the extracted areas are modeled by a quadratic surface using least squares fitting. To improve disparity map modeling robustness, the surface normal is also integrated into the surface modeling process. Furthermore, random sample consensus is utilized to reduce the effects caused by outliers. By comparing the difference between the actual and modeled disparity maps, the potholes can be detected accurately. Finally, the point clouds of the detected potholes are extracted from the reconstructed 3D road surface. The experimental results show that the successful detection accuracy of the proposed system is around 98.7% and the overall pixel-level accuracy is approximately 99.6%.