 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcentration and excess risk bounds for imbalanced classification with synthetic oversampling
Oct 23, 2025



Synthetic oversampling of minority examples using SMOTE and its variants is a leading strategy for addressing imbalanced classification problems. Despite the success of this approach in practice, its theoretical foundations remain underexplored. We develop a theoretical framework to analyze the behavior of SMOTE and related methods when classifiers are trained on synthetic data. We first derive a uniform concentration bound on the discrepancy between the empirical risk over synthetic minority samples and the population risk on the true minority distribution. We then provide a nonparametric excess risk guarantee for kernel-based classifiers trained using such synthetic data. These results lead to practical guidelines for better parameter tuning of both SMOTE and the downstream learning algorithm. Numerical experiments are provided to illustrate and support the theoretical findings
Enhanced Performance of Pre-Trained Networks by Matched Augmentation Distributions
Jan 19, 2022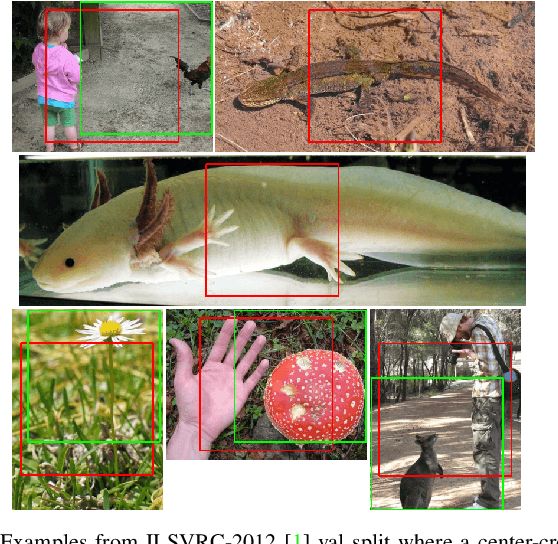
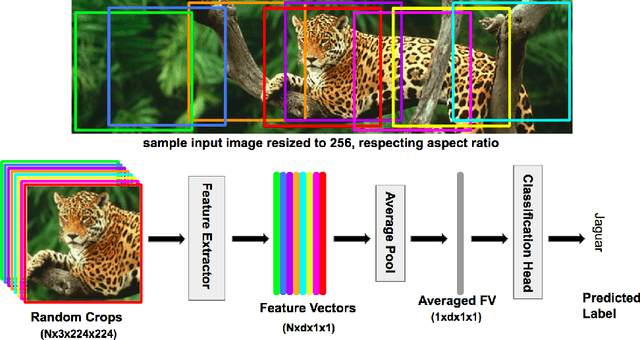
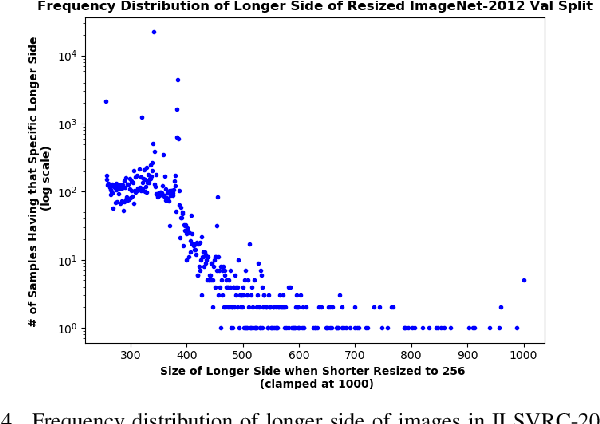
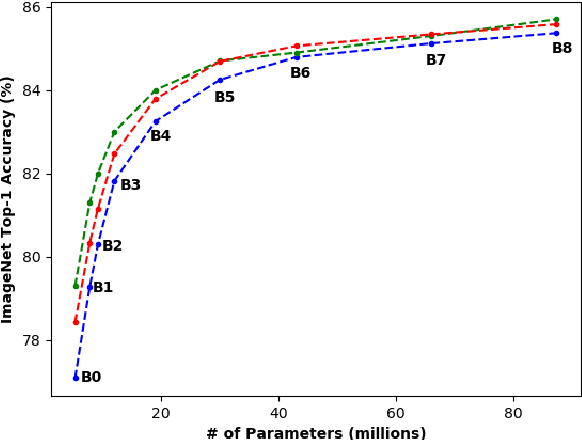
There exists a distribution discrepancy between training and testing, in the way images are fed to modern CNNs. Recent work tried to bridge this gap either by fine-tuning or re-training the network at different resolutions. However re-training a network is rarely cheap and not always viable. To this end, we propose a simple solution to address the train-test distributional shift and enhance the performance of pre-trained models -- which commonly ship as a package with deep learning platforms \eg, PyTorch. Specifically, we demonstrate that running inference on the center crop of an image is not always the best as important discriminatory information may be cropped-off. Instead we propose to combine results for multiple random crops for a test image. This not only matches the train time augmentation but also provides the full coverage of the input image. We explore combining representation of random crops through averaging at different levels \ie, deep feature level, logit level, and softmax level. We demonstrate that, for various families of modern deep networks, such averaging results in better validation accuracy compared to using a single central crop per image. The softmax averaging results in the best performance for various pre-trained networks without requiring any re-training or fine-tuning whatsoever. On modern GPUs with batch processing, the paper's approach to inference of pre-trained networks, is essentially free as all images in a batch can all be processed at once.
Resource Efficient Mountainous Skyline Extraction using Shallow Learning
Jul 23, 2021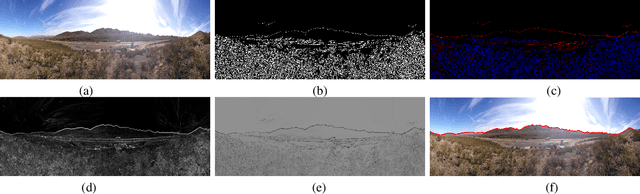
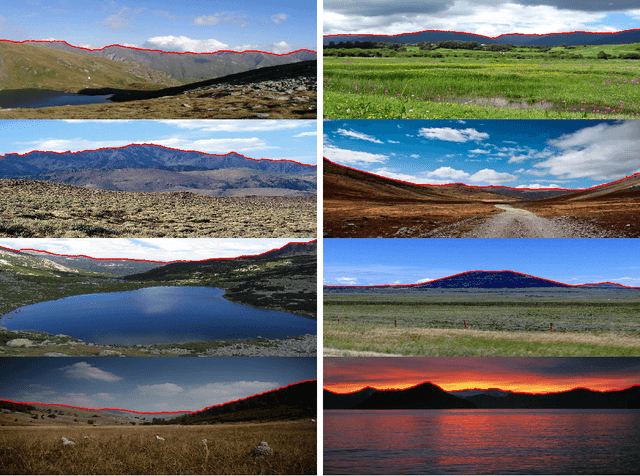

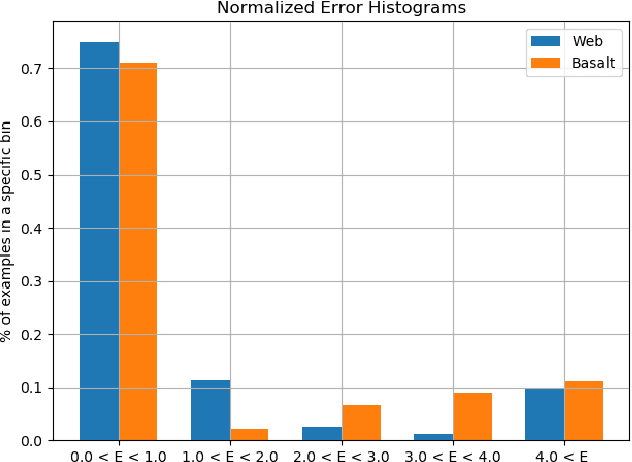
Skyline plays a pivotal role in mountainous visual geo-localization and localization/navigation of planetary rovers/UAVs and virtual/augmented reality applications. We present a novel mountainous skyline detection approach where we adapt a shallow learning approach to learn a set of filters to discriminate between edges belonging to sky-mountain boundary and others coming from different regions. Unlike earlier approaches, which either rely on extraction of explicit feature descriptors and their classification, or fine-tuning general scene parsing deep networks for sky segmentation, our approach learns linear filters based on local structure analysis. At test time, for every candidate edge pixel, a single filter is chosen from the set of learned filters based on pixel's structure tensor, and then applied to the patch around it. We then employ dynamic programming to solve the shortest path problem for the resultant multistage graph to get the sky-mountain boundary. The proposed approach is computationally faster than earlier methods while providing comparable performance and is more suitable for resource constrained platforms e.g., mobile devices, planetary rovers and UAVs. We compare our proposed approach against earlier skyline detection methods using four different data sets. Our code is available at \url{https://github.com/TouqeerAhmad/skyline_detection}.
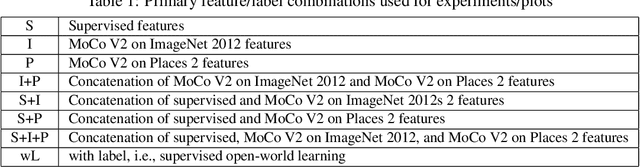
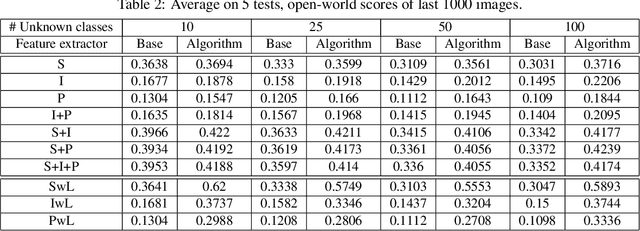
Self-Supervised Features Improve Open-World Learning
Feb 15, 2021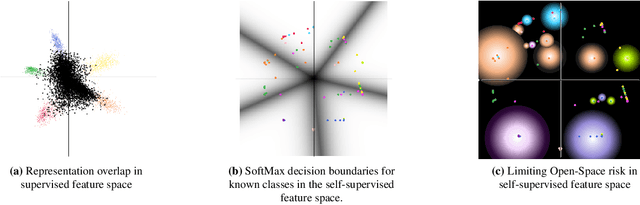
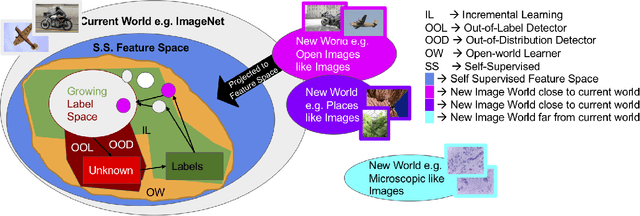
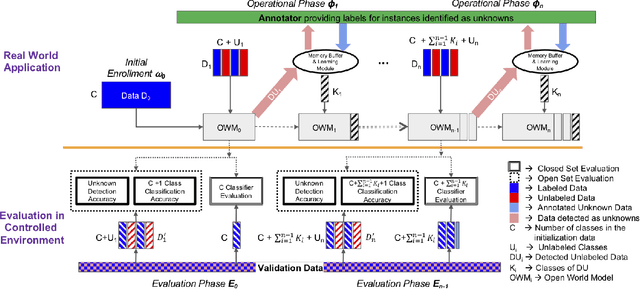
This is a position paper that addresses the problem of Open-World learning while proposing for the underlying feature representation to be learnt using self-supervision. We also present an unifying open-world framework combining three individual research dimensions which have been explored independently \ie Incremental Learning, Out-of-Distribution detection and Open-World learning. We observe that the supervised feature representations are limited and degenerate for the Open-World setting and unsupervised feature representation is native to each of these three problem domains. Under an unsupervised feature representation, we categorize the problem of detecting unknowns as either Out-of-Label-space or Out-of-Distribution detection, depending on the data used during system training versus system testing. The incremental learning component of our pipeline is a zero-exemplar online model which performs comparatively against state-of-the-art on ImageNet-100 protocol and does not require any back-propagation or retraining of the underlying deep-network. It further outperforms the current state-of-the-art by simply using the same number of exemplars as its counterparts. To evaluate our approach for Open-World learning, we propose a new comprehensive protocol and evaluate its performance in both Out-of-Label and Out-of-Distribution settings for each incremental stage. We also demonstrate the adaptability of our approach by showing how it can work as a plug-in with any of the recently proposed self-supervised feature representation methods.
Open-World Learning Without Labels
Dec 14, 2020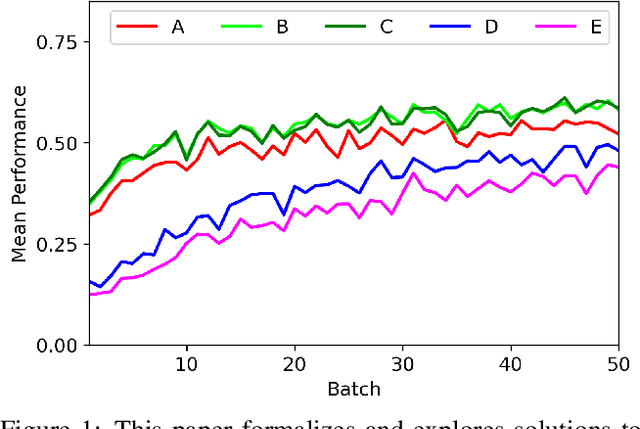
Open-world learning is a problem where an autonomous agent detects things that it does not know and learns them over time from a non-stationary and never-ending stream of data; in an open-world environment, the training data and objective criteria are never available at once. The agent should grasp new knowledge from learning without forgetting acquired prior knowledge. Researchers proposed a few open-world learning agents for image classification tasks that operate in complex scenarios. However, all prior work on open-world learning has all labeled data to learn the new classes from the stream of images. In scenarios where autonomous agents should respond in near real-time or work in areas with limited communication infrastructure, human labeling of data is not possible. Therefore, supervised open-world learning agents are not scalable solutions for such applications. Herein, we propose a new framework that enables agents to learn new classes from a stream of unlabeled data in an unsupervised manner. Also, we study the robustness and learning speed of such agents with supervised and unsupervised feature representation. We also introduce a new metric for open-world learning without labels. We anticipate our theories and method to be a starting point for developing autonomous true open-world never-ending learning agents.
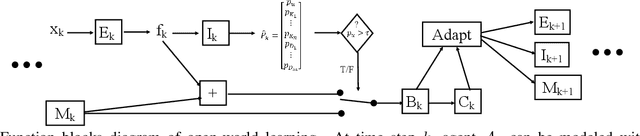
Automatic Open-World Reliability Assessment
Nov 11, 2020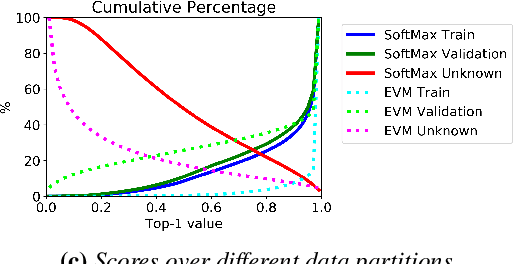
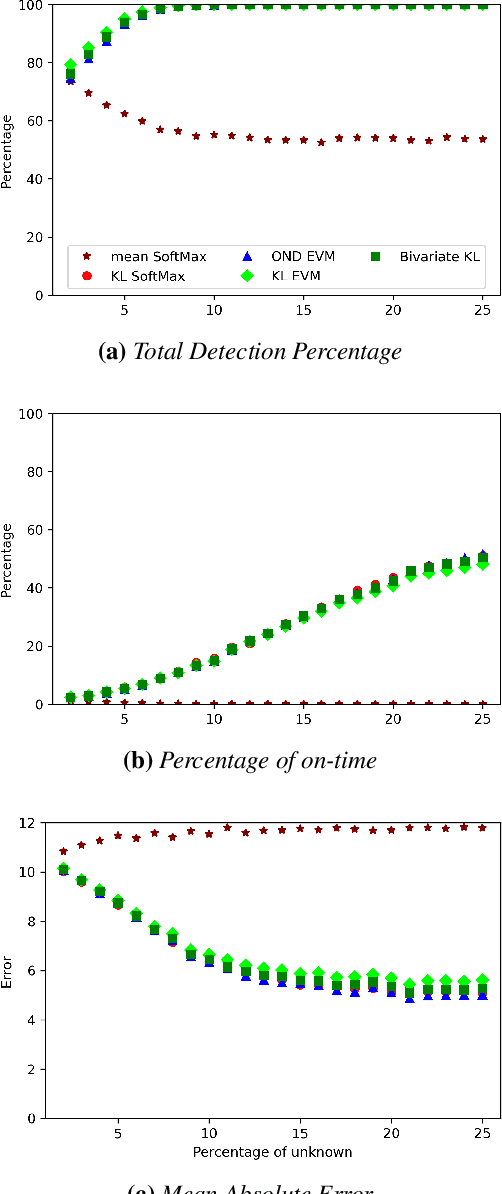
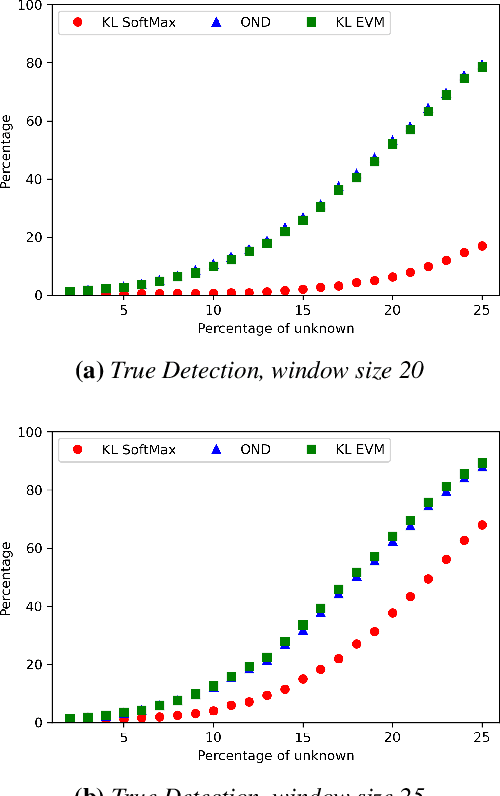
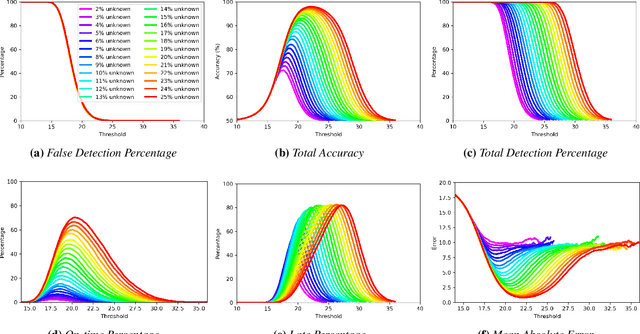
Image classification in the open-world must handle out-of-distribution (OOD) images. Systems should ideally reject OOD images, or they will map atop of known classes and reduce reliability. Using open-set classifiers that can reject OOD inputs can help. However, optimal accuracy of open-set classifiers depend on the frequency of OOD data. Thus, for either standard or open-set classifiers, it is important to be able to determine when the world changes and increasing OOD inputs will result in reduced system reliability. However, during operations, we cannot directly assess accuracy as there are no labels. Thus, the reliability assessment of these classifiers must be done by human operators, made more complex because networks are not 100% accurate, so some failures are to be expected. To automate this process, herein, we formalize the open-world recognition reliability problem and propose multiple automatic reliability assessment policies to address this new problem using only the distribution of reported scores/probability data. The distributional algorithms can be applied to both classic classifiers with SoftMax as well as the open-world Extreme Value Machine (EVM) to provide automated reliability assessment. We show that all of the new algorithms significantly outperform detection using the mean of SoftMax.
* 2021 IEEE Winter Conference on Applications of Computer Vision (WACV)
Comparison of Semantic Segmentation Approaches for Horizon/Sky Line Detection
May 21, 2018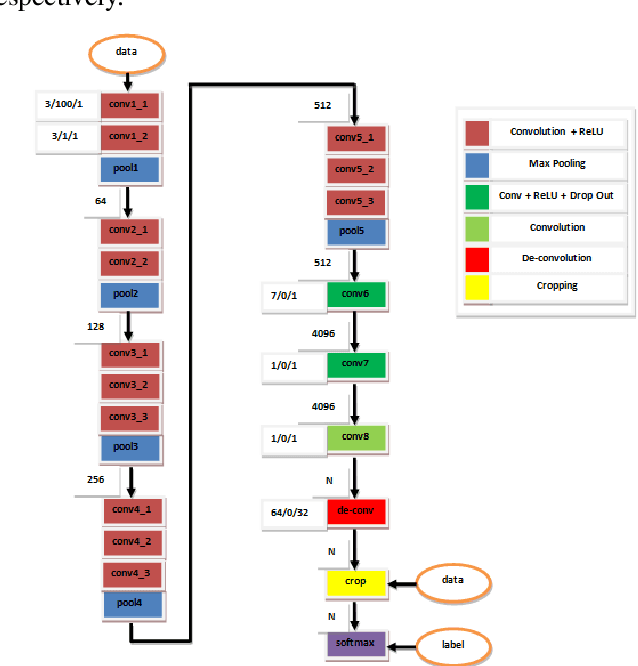

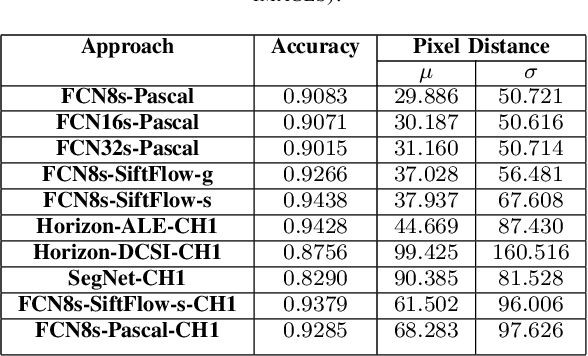
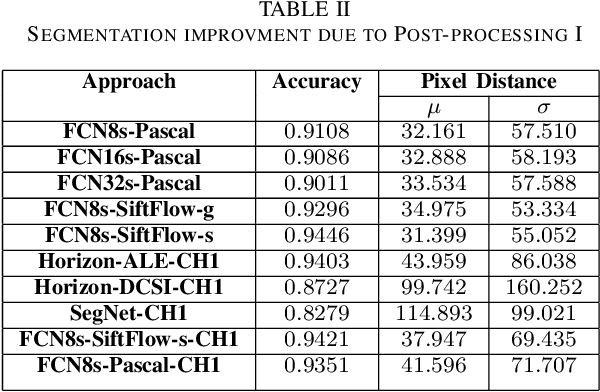
Horizon or skyline detection plays a vital role towards mountainous visual geo-localization, however most of the recently proposed visual geo-localization approaches rely on \textbf{user-in-the-loop} skyline detection methods. Detecting such a segmenting boundary fully autonomously would definitely be a step forward for these localization approaches. This paper provides a quantitative comparison of four such methods for autonomous horizon/sky line detection on an extensive data set. Specifically, we provide the comparison between four recently proposed segmentation methods; one explicitly targeting the problem of horizon detection\cite{Ahmad15}, second focused on visual geo-localization but relying on accurate detection of skyline \cite{Saurer16} and other two proposed for general semantic segmentation -- Fully Convolutional Networks (FCN) \cite{Long15} and SegNet\cite{Badrinarayanan15}. Each of the first two methods is trained on a common training set \cite{Baatz12} comprised of about 200 images while models for the third and fourth method are fine tuned for sky segmentation problem through transfer learning using the same data set. Each of the method is tested on an extensive test set (about 3K images) covering various challenging geographical, weather, illumination and seasonal conditions. We report average accuracy and average absolute pixel error for each of the presented formulation.