 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePilots and Other Predictable Elements of the Starlink Ku-Band Downlink
Feb 02, 2026We identify and characterize dedicated pilot symbols and other predictable elements embedded within the Starlink Ku-band downlink waveform. Exploitation of these predictable elements enables precise opportunistic positioning, navigation, and timing using compact, low-gain receivers by maximizing the signal processing gain available for signal acquisition and time-of-arrival (TOA) estimation. We develop an acquisition and demodulation framework to decode Starlink frames and disclose the explicit sequences of the edge pilots -- bands of 4QAM symbols located at both edges of each Starlink channel that apparently repeat identically across all frames, beams, channels, and satellites. We further reveal that the great majority of QPSK-modulated symbols do not carry high-entropy user data but instead follow a regular tessellated structure superimposed on a constant reference template. We demonstrate that exploiting frame-level predictable elements yields a processing gain of approximately 48 dB, thereby enabling low-cost, compact receivers to extract precise TOA measurements even from low-SNR Starlink side beams.
Timing Properties of the Starlink Ku-Band Downlink
Jan 09, 2025



We develop signal capture and analysis techniques for precisely extracting and characterizing the frame timing of the Starlink constellation's Ku-band downlink transmissions. The aim of this work is to determine whether Starlink frame timing has sufficient short-term stability to support pseudorange-based opportunistic positioning, navigation, and timing (PNT). A second goal is to determine whether frame timing is disciplined to a common time scale such as GPS time. Our analysis reveals several timing characteristics not previously known that carry strong implications for PNT. On the favorable side, periods of ns-level jitter in frame arrival times across all satellite versions indicate that Starlink hardware is fundamentally capable of the short-term stability required to support GPS-like PNT. But there are several unfavorable characteristics that, if not addressed, will make GPS-like PNT impractical: (1) The v1.0 and v1.5 Starlink satellites exhibit once-per-second abrupt frame timing adjustments whose magnitude (as large as 100s of ns) and sign appear unpredictable. Similar discontinuities are also present in the v2.0-Mini frame timing, though smaller and irregularly spaced. (2) Episodic 15-s periods of high frame jitter routinely punctuate the nominal low-jitter frame arrival timing. (3) Starlink frame timing is disciplined to GPS time, but only loosely: to within a few ms by adjustments occurring every 15 s; otherwise exhibiting drift that can exceed 20 ppm. These unfavorable characteristics are essentially incompatible with accurate PNT. Fortunately, they appear to be a consequence of software design choices, not hardware limitations. Moreover, they could be compensated with third-party-provided corrections.
OFDM-Based Positioning with Unknown Data Payloads: Bounds and Applications to LEO PNT
Jul 26, 2024



This paper presents bounds, estimators, and signal design strategies for exploiting both known pilot resources and unknown data payload resources in time-of-arrival (TOA)-based positioning systems with orthogonal frequency-division multiplexing (OFDM) signals. It is the first to derive the Ziv-Zakai bound (ZZB) on TOA estimation for OFDM signals containing both known pilot and unknown data resources. In comparison to the Cramer-Rao bounds (CRBs) derived in prior work, this ZZB captures the low-signal-to-noise ratio (SNR) thresholding effects in TOA estimation and accounts for an unknown carrier phase. The derived ZZB is evaluated against CRBs and empirical TOA error variances. It is then evaluated on signals with resource allocations optimized for pilot-only TOA estimation, quantifying the performance gain over the best-case pilot-only signal designs. Finally, the positioning accuracy of maximum-likelihood and decision-directed estimators is evaluated on simulated low-Earth-orbit non-terrestrial-network channels and compared against their respective ZZBs.
MM3DGS SLAM: Multi-modal 3D Gaussian Splatting for SLAM Using Vision, Depth, and Inertial Measurements
Apr 01, 2024Simultaneous localization and mapping is essential for position tracking and scene understanding. 3D Gaussian-based map representations enable photorealistic reconstruction and real-time rendering of scenes using multiple posed cameras. We show for the first time that using 3D Gaussians for map representation with unposed camera images and inertial measurements can enable accurate SLAM. Our method, MM3DGS, addresses the limitations of prior neural radiance field-based representations by enabling faster rendering, scale awareness, and improved trajectory tracking. Our framework enables keyframe-based mapping and tracking utilizing loss functions that incorporate relative pose transformations from pre-integrated inertial measurements, depth estimates, and measures of photometric rendering quality. We also release a multi-modal dataset, UT-MM, collected from a mobile robot equipped with a camera and an inertial measurement unit. Experimental evaluation on several scenes from the dataset shows that MM3DGS achieves 3x improvement in tracking and 5% improvement in photometric rendering quality compared to the current 3DGS SLAM state-of-the-art, while allowing real-time rendering of a high-resolution dense 3D map. Project Webpage: https://vita-group.github.io/MM3DGS-SLAM
Ziv-Zakai-Optimal OFDM Resource Allocation for Time-of-Arrival Estimation
Mar 19, 2024



This paper presents methods of optimizing the placement and power allocations of pilots in an orthogonal frequency-division multiplexing (OFDM) signal to minimize time-of-arrival (TOA) estimation errors under power and resource allocation constraints. TOA errors in this optimization are quantified through the Ziv-Zakai bound (ZZB), which captures error thresholding effects caused by sidelobes in the signal's autocorrelation function (ACF) which are not captured by the Cramer-Rao lower bound. This paper is the first to solve for these ZZB-optimal allocations in the context of OFDM signals, under integer resource allocation constraints, and under both coherent and noncoherent reception. Under convex constraints, the optimization of the ZZB is proven to be convex; under integer constraints, the optimization is lower bounded by a convex relaxation and a branch-and-bound algorithm is proposed for efficiently allocating pilot resources. These allocations are evaluated by their ZZBs and ACFs, compared against a typical uniform allocation, and deployed on a software-defined radio TOA measurement platform to demonstrate their applicability in real-world systems.
Purposeful Co-Design of OFDM Signals for Ranging and Communications
Sep 06, 2023This paper analyzes the fundamental trade-offs that occur in the co-design of orthogonal frequency-division multiplexing signals for both ranging (via time-of-arrival estimation) and communications. These trade-offs are quantified through the Shannon capacity bound, probability of outage, and the Ziv-Zakai bound on range estimation variance. Bounds are derived for signals experiencing frequency-selective Rayleigh block fading, accounting for the impact of limited channel knowledge and multi-antenna reception. Uncompensated carrier frequency offset and phase errors are also factored into the capacity bounds. Analysis based on the derived bounds demonstrates how Pareto-optimal design choices can be made to optimize the communication throughput, probability of outage, and ranging variance. Different signal design strategies are then analyzed, showing how Pareto-optimal design choices change depending on the channel.
Signal Identification and Entrainment for Practical FMCW Radar Spoofing Attacks
Jul 20, 2023



This paper proposes a method of passively estimating the parameters of frequency-modulated-continuous-wave (FMCW) radar signals with a wide range of structural parameter values and analyzes how a malicious actor could employ such estimates to track and spoof a target radar. When radars are implemented to support automated driver assistance systems, an intelligent spoofer has the potential to substantially disrupt safe navigation by inducing its target to perceive false objects. Such a spoofer must acquire highly accurate estimates of the target radar's chirp sweep, timing, and frequency parameters while additionally tracking and compensating for time and Doppler shifts due to clock errors and relative movement. This is a difficult task for millimeter-wave radars due to severe Doppler shifts and fast sweep rates, especially when the spoofer uses off-the-shelf FMCW equipment. Algorithms and techniques for acquiring and tracking an FMCW radar are proposed and verified through simulation, which will help guide future decisions on appropriate radar spoofing countermeasures.
Carrier-phase and IMU based GNSS Spoofing Detection for Ground Vehicles
Feb 28, 2022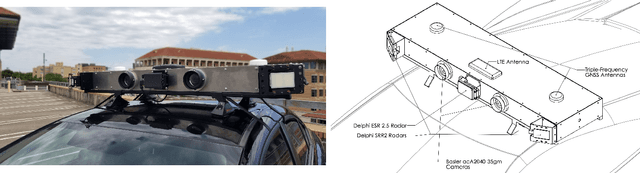

This paper develops, implements, and validates a powerful single-antenna carrier-phase-based test to detect Global Navigation Satellite Systems (GNSS) spoofing attacks on ground vehicles equipped with a low-cost inertial measurement unit (IMU). Increasingly-automated ground vehicles require precise positioning that is resilient to unusual natural or accidental events and secure against deliberate attack. This paper's spoofing detection technique capitalizes on the carrier-phase fixed-ambiguity residual cost produced by a well-calibrated carrier-phase-differential GNSS (CDGNSS) estimator that is tightly coupled with a low-cost IMU. The carrier-phase fixed-ambiguity residual cost is sensitive at the sub-centimeter-level to discrepancies between measured carrier phase values and the values predicted by prior measurements and by the dynamics model, which is based on IMU measurements and on vehicle constraints. Such discrepancies will arise in a spoofing attack due to the attacker's practical inability to predict the centimeter-amplitude vehicle movement caused by roadway irregularities. The effectiveness of the developed spoofing detection method is evaluated with data captured by a vehicle-mounted sensor suite in Austin, Texas. The dataset includes both consumer- and industrial-grade IMU data and a diverse set of multipath environments (open sky, shallow urban, and deep urban). Artificial worst-case spoofing attacks injected into the dataset are detected within two seconds.
Low-Cost Inertial Aiding for Deep-Urban Tightly-Coupled Multi-Antenna Precise GNSS
Jan 27, 2022
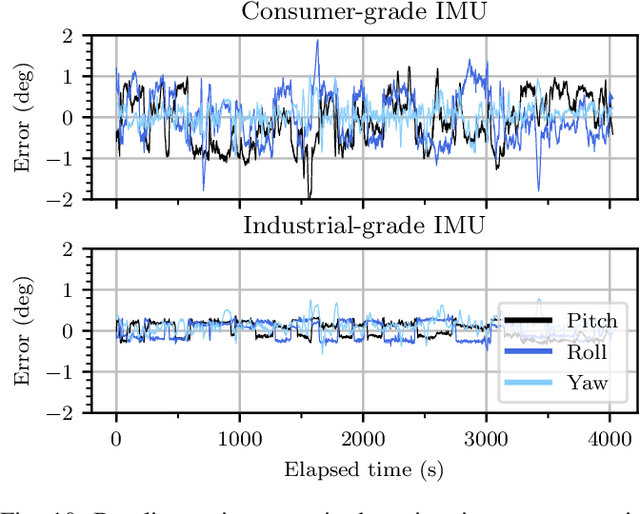
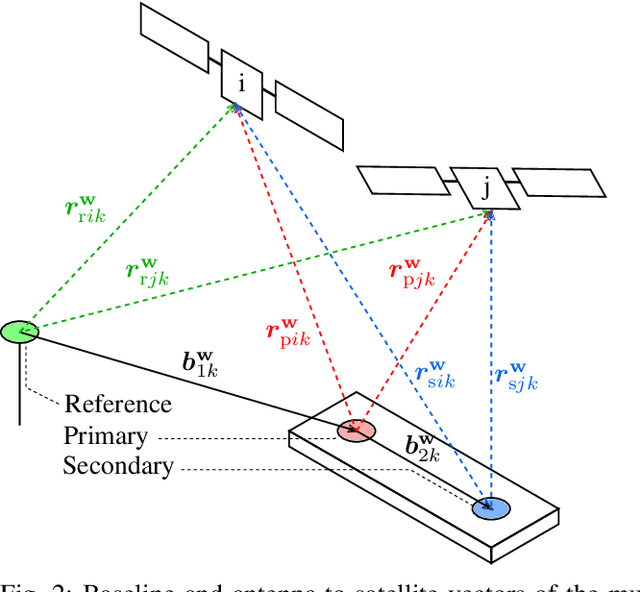
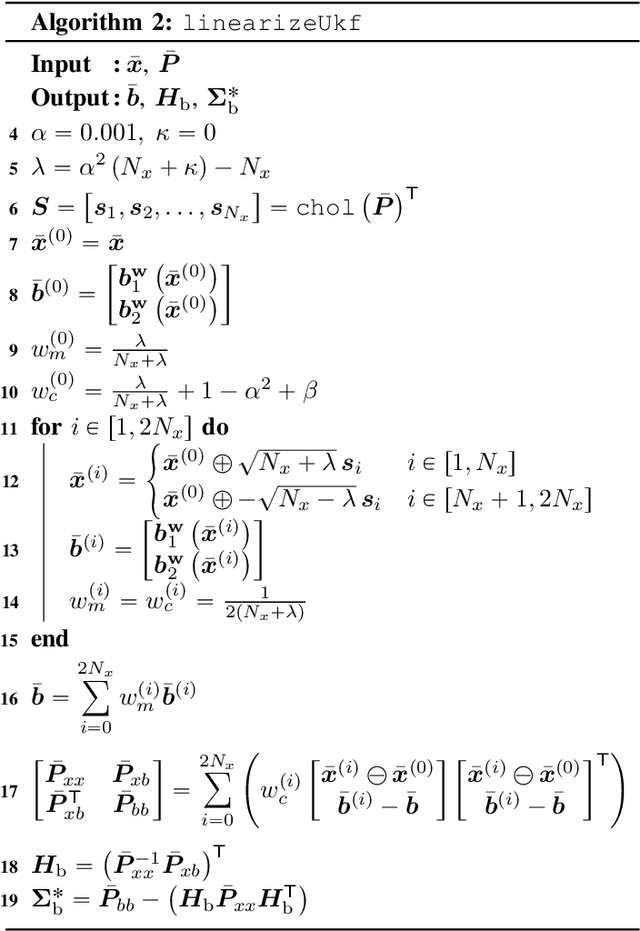
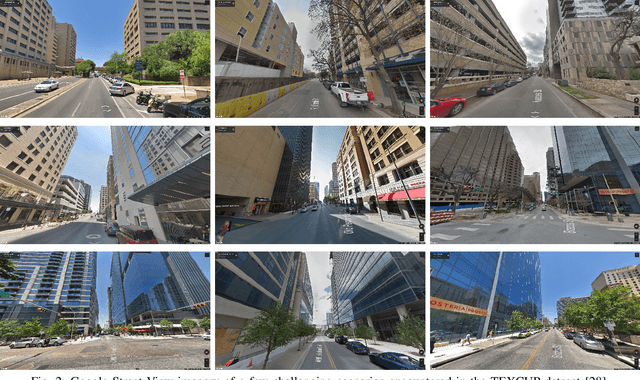
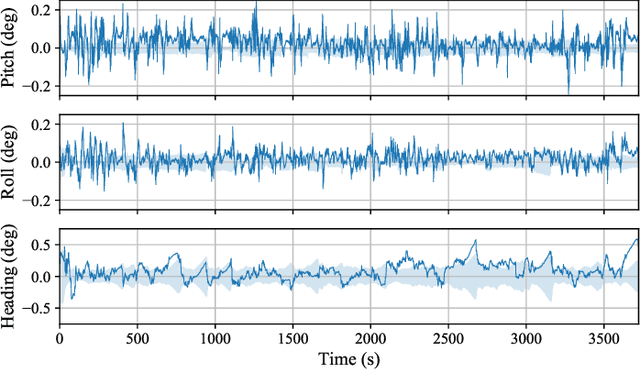
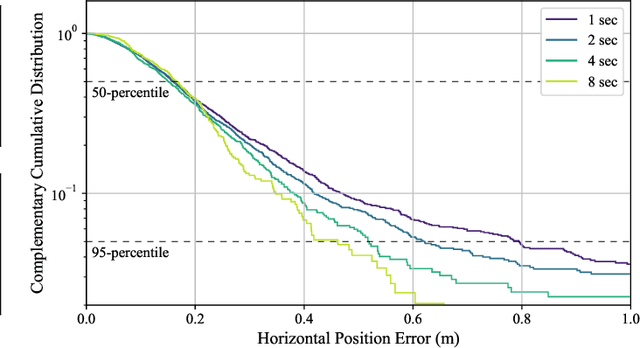
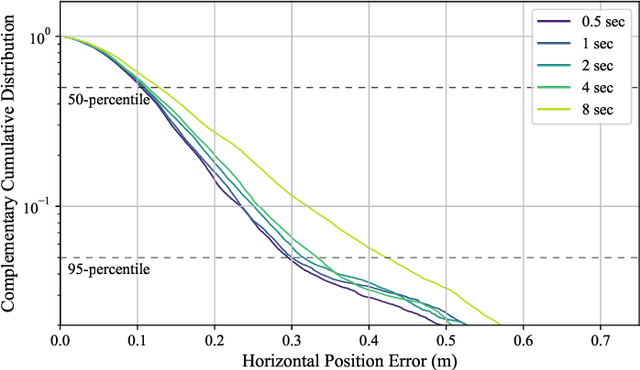
A vehicular pose estimation technique is presented that tightly couples multi-antenna carrier-phase differential GNSS (CDGNSS) with a low-cost MEMS inertial sensor and vehicle dynamics constraints. This work is the first to explore the use of consumer-grade inertial sensors for tightly-coupled urban CDGNSS, and first to explore the tightly-coupled combination of multi-antenna CDGNSS and inertial sensing (of any quality) for urban navigation. An unscented linearization permits ambiguity resolution using traditional integer least squares while both implicitly enforcing known-baseline-length constraints and exploiting the multi-baseline problem's inter-baseline correlations. A novel false fix detection and recovery technique is developed to mitigate the effect of conditioning the filter state on incorrect integers. When evaluated on the publicly-available TEX-CUP urban positioning dataset, the proposed technique achieves, with consumer- and industrial-grade inertial sensors, respectively, a 96.6% and 97.5% integer fix availability, and 12.0 cm and 10.1 cm overall (fix and float) 95th percentile horizontal positioning error.
All-Weather sub-50-cm Radar-Inertial Positioning
Sep 09, 2020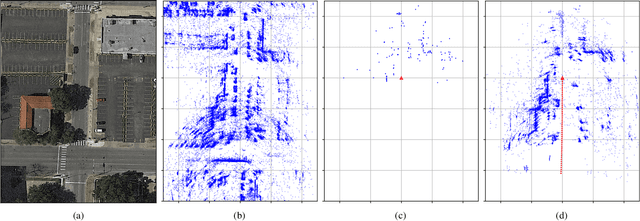
Deployment of automated ground vehicles beyond the confines of sunny and dry climes will require sub-lane-level positioning techniques based on radio waves rather than near-visible-light radiation. Like human sight, lidar and cameras perform poorly in low-visibility conditions. This paper develops and demonstrates a novel technique for robust sub-50-cm-accurate urban ground vehicle positioning based on all-weather sensors. The technique incorporates a computationally-efficient globally-optimal radar scan batch registration algorithm into a larger estimation pipeline that fuses data from commercially-available low-cost automotive radars, low-cost inertial sensors, vehicle motion constraints, and, when available, precise GNSS measurements. Performance is evaluated on an extensive and realistic urban data set. Comparison against ground truth shows that during 60 minutes of GNSS-denied driving in the urban center of Austin, TX, the technique maintains 95th-percentile errors below 50 cm in horizontal position and 0.5 degrees in heading.