 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTEX-CUP: The University of Texas Challenge for Urban Positioning
May 02, 2020
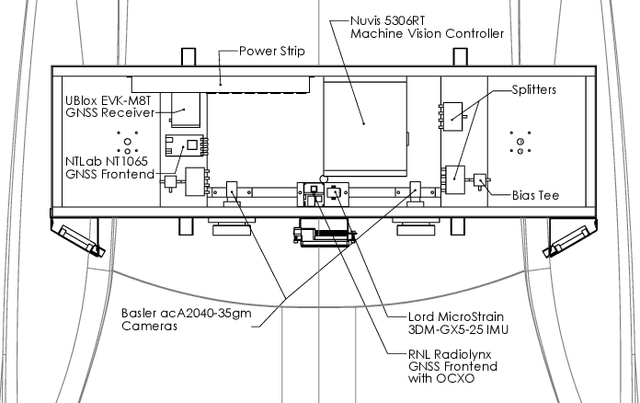

A public benchmark dataset collected in the dense urban center of the city of Austin, TX is introduced for evaluation of multi-sensor GNSS-based urban positioning. Existing public datasets on localization and/or odometry evaluation are based on sensors such as lidar, cameras, and radar. The role of GNSS in these datasets is typically limited to the generation of a reference trajectory in conjunction with a high-end inertial navigation system (INS). In contrast, the dataset introduced in this paper provides raw ADC output of wideband intermediate frequency (IF) GNSS data along with tightly synchronized raw measurements from inertial measurement units (IMUs) and a stereoscopic camera unit. This dataset will enable optimization of the full GNSS stack from signal tracking to state estimation, as well as sensor fusion with other automotive sensors. The dataset is available at http://radionavlab.ae.utexas.edu under Public Datasets. Efforts to collect and share similar datasets from a number of dense urban centers around the world are under way.
Deep urban unaided precise GNSS vehicle positioning
Jun 23, 2019


This paper presents the most thorough study to date of vehicular carrier-phase differential GNSS (CDGNSS) positioning performance in a deep urban setting unaided by complementary sensors. Using data captured during approximately 2 hours of driving in and around the dense urban center of Austin, TX, a CDGNSS system is demonstrated to achieve 17-cm-accurate 3D urban positioning (95% probability) with solution availability greater than 87%. The results are achieved without any aiding by inertial, electro-optical, or odometry sensors. Development and evaluation of the unaided GNSS-based precise positioning system is a key milestone toward the overall goal of combining precise GNSS, vision, radar, and inertial sensing for all-weather high-integrity high-absolute-accuracy positioning for automated and connected vehicles. The system described and evaluated herein is composed of a densely-spaced reference network, a software-defined GNSS receiver, and a real-time kinematic (RTK) positioning engine. A performance sensitivity analysis reveals that navigation data wipeoff for fully-modulated GNSS signals and a dense reference network are key to high-performance urban RTK positioning. A comparison with existing unaided systems for urban GNSS processing indicates that the proposed system has significantly greater availability or accuracy.