 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDownlink Analysis of LEO Multi-Beam Satellite Communication in Shadowed Rician Channels
Jul 29, 2021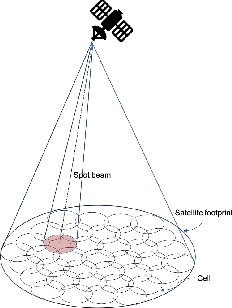
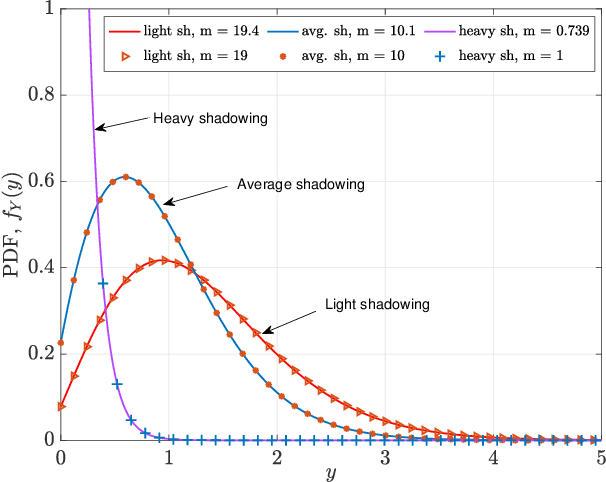
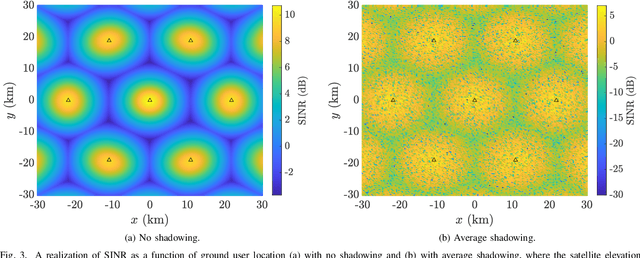
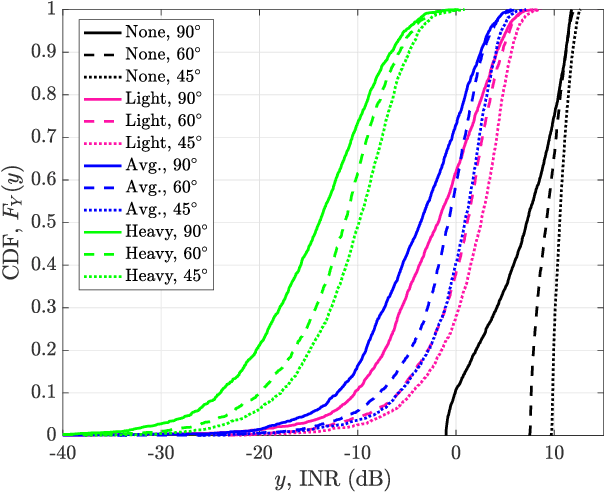
The coming extension of cellular technology to base-stations in low-earth orbit (LEO) requires a fresh look at terrestrial 3GPP channel models. Relative to such models, sky-to-ground cellular channels will exhibit less diffraction, deeper shadowing, larger Doppler shifts, and possibly far stronger cross-cell interference: consequences of high elevation angles and extreme "sectorization" of LEO satellite transmissions into partially-overlapping spot beams. To permit forecasting of expected signal-to-noise ratio (SNR), interference-to-noise ratio (INR) and probability of outage, we characterize the powers of desired and interference signals as received by ground users from such a LEO satellite. In particular, building on the Shadowed Rician channel model, we observe that co-cell and cross-cell sky-to-ground signals travel along similar paths, whereas terrestrial co- and cross-cell signals travel along very different paths. We characterize SNR, signal-to-interference ratio (SIR), and INR using transmit beam profiles and linear relationships that we establish between certain Shadowed Rician random variables. These tools allow us to simplify certain density functions and moments, facilitating future analysis. Numerical results yield insight into the key question of whether emerging LEO systems should be viewed as interference- or noise-limited.
All-Weather sub-50-cm Radar-Inertial Positioning
Sep 09, 2020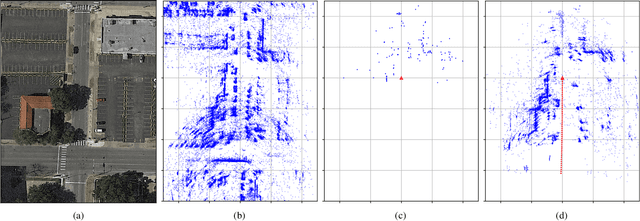
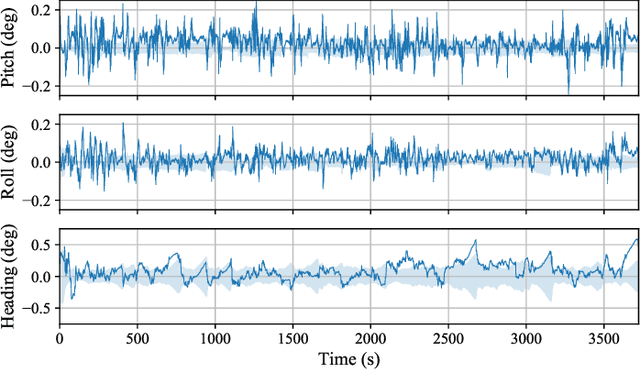
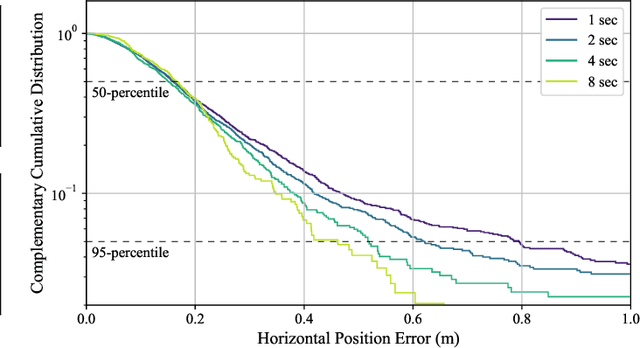
Deployment of automated ground vehicles beyond the confines of sunny and dry climes will require sub-lane-level positioning techniques based on radio waves rather than near-visible-light radiation. Like human sight, lidar and cameras perform poorly in low-visibility conditions. This paper develops and demonstrates a novel technique for robust sub-50-cm-accurate urban ground vehicle positioning based on all-weather sensors. The technique incorporates a computationally-efficient globally-optimal radar scan batch registration algorithm into a larger estimation pipeline that fuses data from commercially-available low-cost automotive radars, low-cost inertial sensors, vehicle motion constraints, and, when available, precise GNSS measurements. Performance is evaluated on an extensive and realistic urban data set. Comparison against ground truth shows that during 60 minutes of GNSS-denied driving in the urban center of Austin, TX, the technique maintains 95th-percentile errors below 50 cm in horizontal position and 0.5 degrees in heading.
Automotive-Radar-Based 50-cm Urban Positioning
May 02, 2020


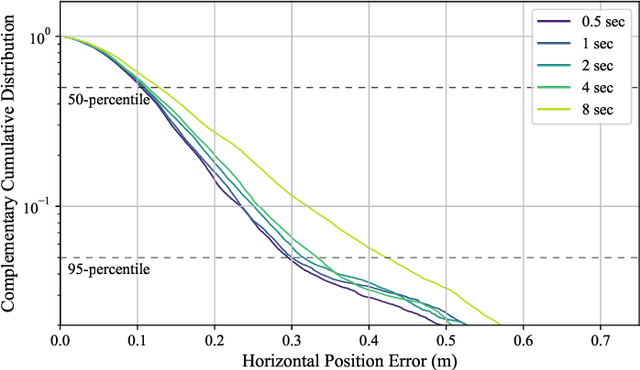
Deployment of automated ground vehicles (AGVs) beyond the confines of sunny and dry climes will require sub-lane-level positioning techniques based on radio waves rather than near-visible-light radiation. Like human sight, lidar and cameras perform poorly in low-visibility conditions. This paper develops and demonstrates a novel technique for robust 50-cm-accurate urban ground positioning based on commercially-available low-cost automotive radars. The technique is computationally efficient yet obtains a globally-optimal translation and heading solution, avoiding local minima caused by repeating patterns in the urban radar environment. Performance is evaluated on an extensive and realistic urban data set. Comparison against ground truth shows that, when coupled with stable short-term odometry, the technique maintains 95-percentile errors below 50 cm in horizontal position and 1 degree in heading.