 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Cost Inertial Aiding for Deep-Urban Tightly-Coupled Multi-Antenna Precise GNSS
Paper and Code
Jan 27, 2022
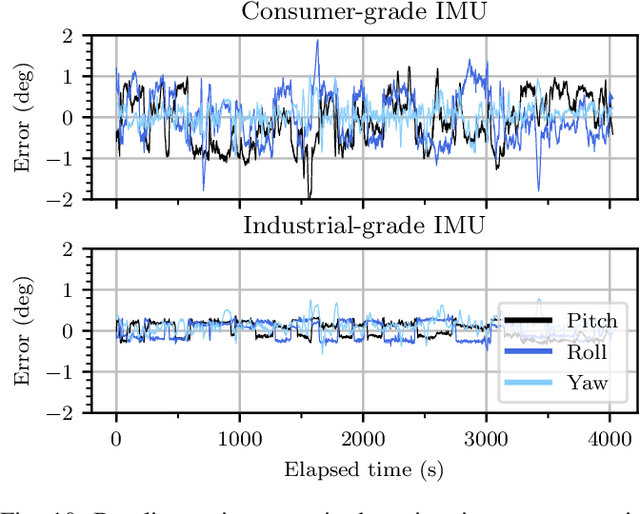
A vehicular pose estimation technique is presented that tightly couples multi-antenna carrier-phase differential GNSS (CDGNSS) with a low-cost MEMS inertial sensor and vehicle dynamics constraints. This work is the first to explore the use of consumer-grade inertial sensors for tightly-coupled urban CDGNSS, and first to explore the tightly-coupled combination of multi-antenna CDGNSS and inertial sensing (of any quality) for urban navigation. An unscented linearization permits ambiguity resolution using traditional integer least squares while both implicitly enforcing known-baseline-length constraints and exploiting the multi-baseline problem's inter-baseline correlations. A novel false fix detection and recovery technique is developed to mitigate the effect of conditioning the filter state on incorrect integers. When evaluated on the publicly-available TEX-CUP urban positioning dataset, the proposed technique achieves, with consumer- and industrial-grade inertial sensors, respectively, a 96.6% and 97.5% integer fix availability, and 12.0 cm and 10.1 cm overall (fix and float) 95th percentile horizontal positioning error.