 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCarrier-phase and IMU based GNSS Spoofing Detection for Ground Vehicles
Feb 28, 2022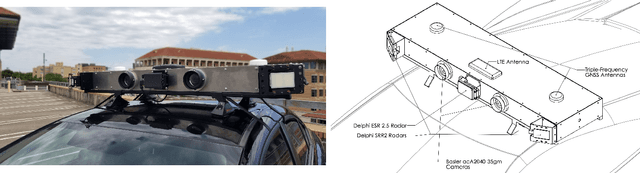
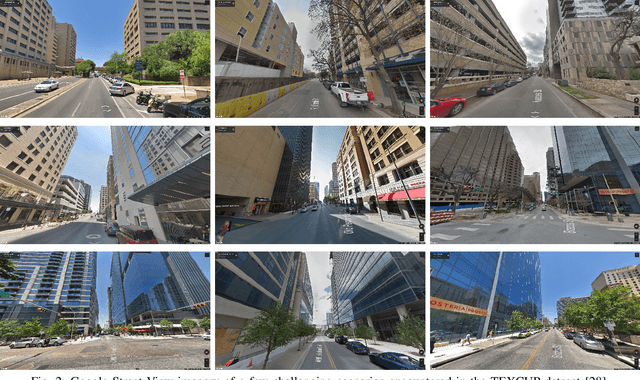

This paper develops, implements, and validates a powerful single-antenna carrier-phase-based test to detect Global Navigation Satellite Systems (GNSS) spoofing attacks on ground vehicles equipped with a low-cost inertial measurement unit (IMU). Increasingly-automated ground vehicles require precise positioning that is resilient to unusual natural or accidental events and secure against deliberate attack. This paper's spoofing detection technique capitalizes on the carrier-phase fixed-ambiguity residual cost produced by a well-calibrated carrier-phase-differential GNSS (CDGNSS) estimator that is tightly coupled with a low-cost IMU. The carrier-phase fixed-ambiguity residual cost is sensitive at the sub-centimeter-level to discrepancies between measured carrier phase values and the values predicted by prior measurements and by the dynamics model, which is based on IMU measurements and on vehicle constraints. Such discrepancies will arise in a spoofing attack due to the attacker's practical inability to predict the centimeter-amplitude vehicle movement caused by roadway irregularities. The effectiveness of the developed spoofing detection method is evaluated with data captured by a vehicle-mounted sensor suite in Austin, Texas. The dataset includes both consumer- and industrial-grade IMU data and a diverse set of multipath environments (open sky, shallow urban, and deep urban). Artificial worst-case spoofing attacks injected into the dataset are detected within two seconds.