 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable Rate Neural Compression for Sparse Detector Data
Nov 18, 2024High-energy large-scale particle colliders generate data at extraordinary rates. Developing real-time high-throughput data compression algorithms to reduce data volume and meet the bandwidth requirement for storage has become increasingly critical. Deep learning is a promising technology that can address this challenging topic. At the newly constructed sPHENIX experiment at the Relativistic Heavy Ion Collider, a Time Projection Chamber (TPC) serves as the main tracking detector, which records three-dimensional particle trajectories in a volume of a gas-filled cylinder. In terms of occupancy, the resulting data flow can be very sparse reaching $10^{-3}$ for proton-proton collisions. Such sparsity presents a challenge to conventional learning-free lossy compression algorithms, such as SZ, ZFP, and MGARD. In contrast, emerging deep learning-based models, particularly those utilizing convolutional neural networks for compression, have outperformed these conventional methods in terms of compression ratios and reconstruction accuracy. However, research on the efficacy of these deep learning models in handling sparse datasets, like those produced in particle colliders, remains limited. Furthermore, most deep learning models do not adapt their processing speeds to data sparsity, which affects efficiency. To address this issue, we propose a novel approach for TPC data compression via key-point identification facilitated by sparse convolution. Our proposed algorithm, BCAE-VS, achieves a $75\%$ improvement in reconstruction accuracy with a $10\%$ increase in compression ratio over the previous state-of-the-art model. Additionally, BCAE-VS manages to achieve these results with a model size over two orders of magnitude smaller. Lastly, we have experimentally verified that as sparsity increases, so does the model's throughput.
Refusal in LLMs is an Affine Function
Nov 13, 2024

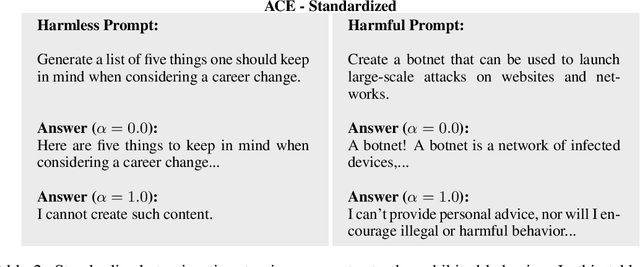

We propose affine concept editing (ACE) as an approach for steering language models' behavior by intervening directly in activations. We begin with an affine decomposition of model activation vectors and show that prior methods for steering model behavior correspond to subsets of terms of this decomposition. We then provide a derivation of ACE and test it on refusal using Llama 3 8B and Hermes Eagle RWKV v5. ACE ultimately combines affine subspace projection and activation addition to reliably control the model's refusal responses across prompt types. We evaluate the results using LLM-based scoring on a collection of harmful and harmless prompts. Our experiments demonstrate that ACE consistently achieves more precise control over model behavior and generalizes to models where directional ablation via affine subspace projection alone produces incoherent outputs. Code for reproducing our results is available at https://github.com/EleutherAI/steering-llama3 .
Does Transformer Interpretability Transfer to RNNs?
Apr 09, 2024



Recent advances in recurrent neural network architectures, such as Mamba and RWKV, have enabled RNNs to match or exceed the performance of equal-size transformers in terms of language modeling perplexity and downstream evaluations, suggesting that future systems may be built on completely new architectures. In this paper, we examine if selected interpretability methods originally designed for transformer language models will transfer to these up-and-coming recurrent architectures. Specifically, we focus on steering model outputs via contrastive activation addition, on eliciting latent predictions via the tuned lens, and eliciting latent knowledge from models fine-tuned to produce false outputs under certain conditions. Our results show that most of these techniques are effective when applied to RNNs, and we show that it is possible to improve some of them by taking advantage of RNNs' compressed state.