 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal State Distillation for Explainable Reinforcement Learning
Dec 30, 2023



Reinforcement learning (RL) is a powerful technique for training intelligent agents, but understanding why these agents make specific decisions can be quite challenging. This lack of transparency in RL models has been a long-standing problem, making it difficult for users to grasp the reasons behind an agent's behaviour. Various approaches have been explored to address this problem, with one promising avenue being reward decomposition (RD). RD is appealing as it sidesteps some of the concerns associated with other methods that attempt to rationalize an agent's behaviour in a post-hoc manner. RD works by exposing various facets of the rewards that contribute to the agent's objectives during training. However, RD alone has limitations as it primarily offers insights based on sub-rewards and does not delve into the intricate cause-and-effect relationships that occur within an RL agent's neural model. In this paper, we present an extension of RD that goes beyond sub-rewards to provide more informative explanations. Our approach is centred on a causal learning framework that leverages information-theoretic measures for explanation objectives that encourage three crucial properties of causal factors: \emph{causal sufficiency}, \emph{sparseness}, and \emph{orthogonality}. These properties help us distill the cause-and-effect relationships between the agent's states and actions or rewards, allowing for a deeper understanding of its decision-making processes. Our framework is designed to generate local explanations and can be applied to a wide range of RL tasks with multiple reward channels. Through a series of experiments, we demonstrate that our approach offers more meaningful and insightful explanations for the agent's action selections.
Reinforcement Learning with Time-dependent Goals for Robotic Musicians
Nov 11, 2020
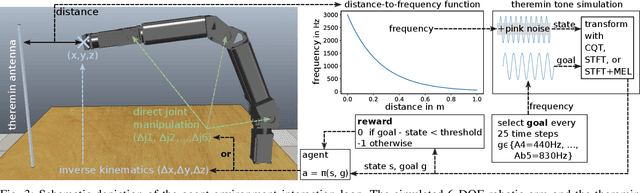

Reinforcement learning is a promising method to accomplish robotic control tasks. The task of playing musical instruments is, however, largely unexplored because it involves the challenge of achieving sequential goals - melodies - that have a temporal dimension. In this paper, we address robotic musicianship by introducing a temporal extension to goal-conditioned reinforcement learning: Time-dependent goals. We demonstrate that these can be used to train a robotic musician to play the theremin instrument. We train the robotic agent in simulation and transfer the acquired policy to a real-world robotic thereminist. Supplemental video: https://youtu.be/jvC9mPzdQN4