 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Accelerating 3D Deep Learning with PyTorch3D
Jul 16, 2020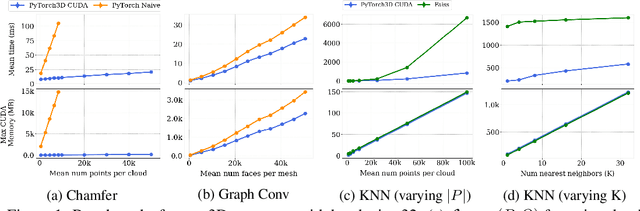
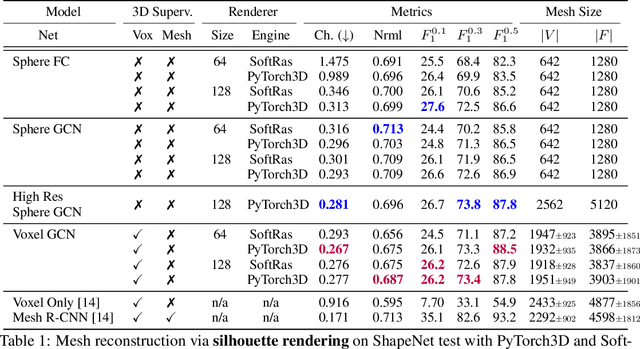
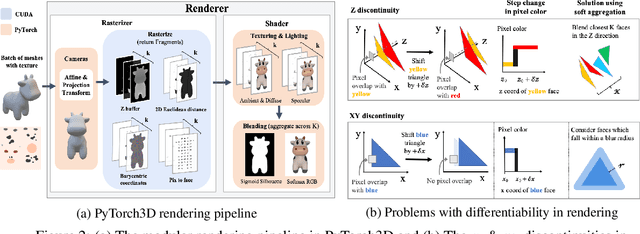
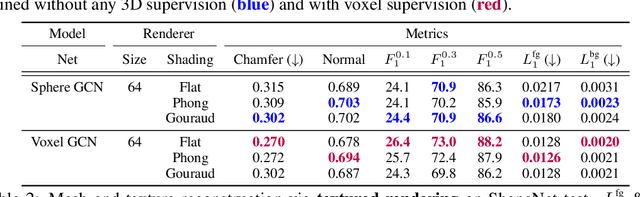
Deep learning has significantly improved 2D image recognition. Extending into 3D may advance many new applications including autonomous vehicles, virtual and augmented reality, authoring 3D content, and even improving 2D recognition. However despite growing interest, 3D deep learning remains relatively underexplored. We believe that some of this disparity is due to the engineering challenges involved in 3D deep learning, such as efficiently processing heterogeneous data and reframing graphics operations to be differentiable. We address these challenges by introducing PyTorch3D, a library of modular, efficient, and differentiable operators for 3D deep learning. It includes a fast, modular differentiable renderer for meshes and point clouds, enabling analysis-by-synthesis approaches. Compared with other differentiable renderers, PyTorch3D is more modular and efficient, allowing users to more easily extend it while also gracefully scaling to large meshes and images. We compare the PyTorch3D operators and renderer with other implementations and demonstrate significant speed and memory improvements. We also use PyTorch3D to improve the state-of-the-art for unsupervised 3D mesh and point cloud prediction from 2D images on ShapeNet. PyTorch3D is open-source and we hope it will help accelerate research in 3D deep learning.