 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLIPGaussian: Universal and Multimodal Style Transfer Based on Gaussian Splatting
May 28, 2025
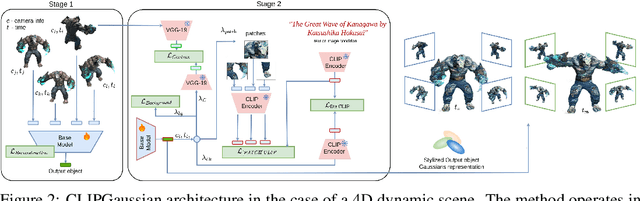

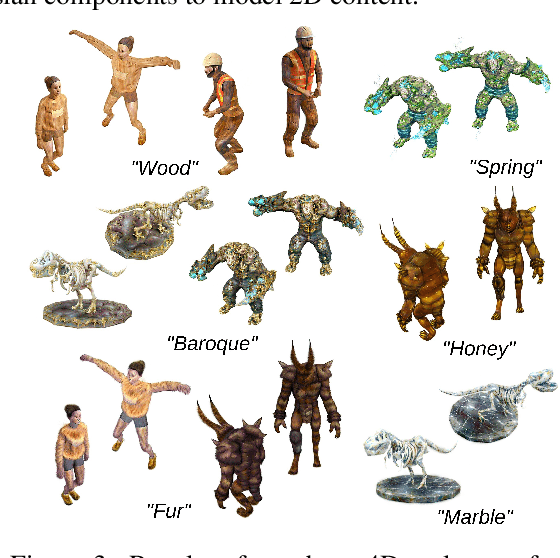
Gaussian Splatting (GS) has recently emerged as an efficient representation for rendering 3D scenes from 2D images and has been extended to images, videos, and dynamic 4D content. However, applying style transfer to GS-based representations, especially beyond simple color changes, remains challenging. In this work, we introduce CLIPGaussians, the first unified style transfer framework that supports text- and image-guided stylization across multiple modalities: 2D images, videos, 3D objects, and 4D scenes. Our method operates directly on Gaussian primitives and integrates into existing GS pipelines as a plug-in module, without requiring large generative models or retraining from scratch. CLIPGaussians approach enables joint optimization of color and geometry in 3D and 4D settings, and achieves temporal coherence in videos, while preserving a model size. We demonstrate superior style fidelity and consistency across all tasks, validating CLIPGaussians as a universal and efficient solution for multimodal style transfer.
RaySplats: Ray Tracing based Gaussian Splatting
Jan 31, 2025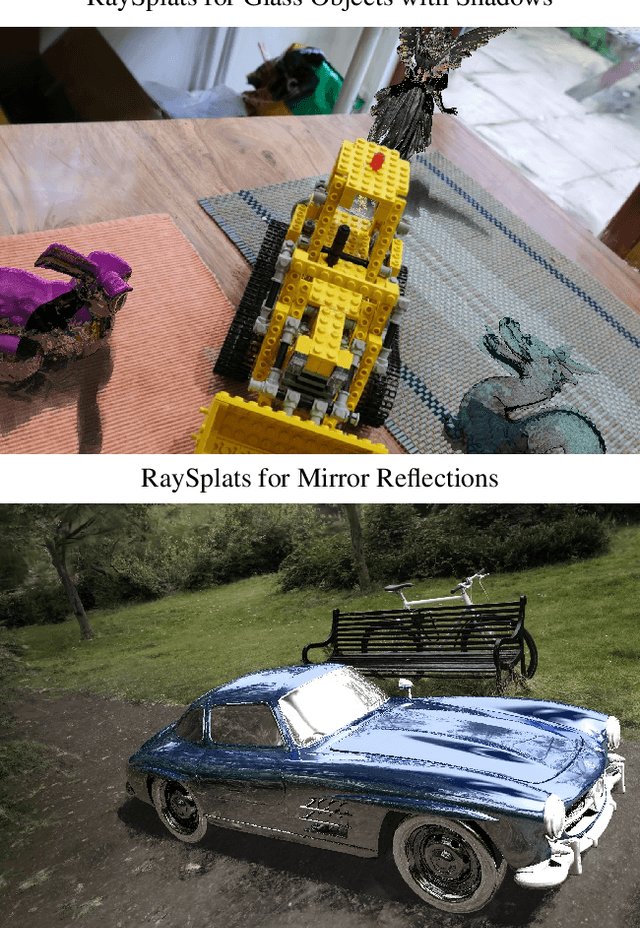
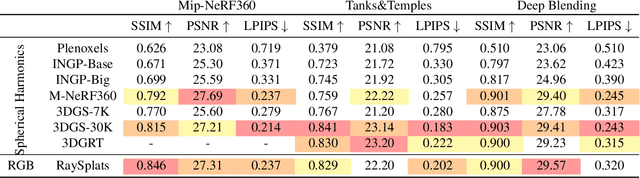
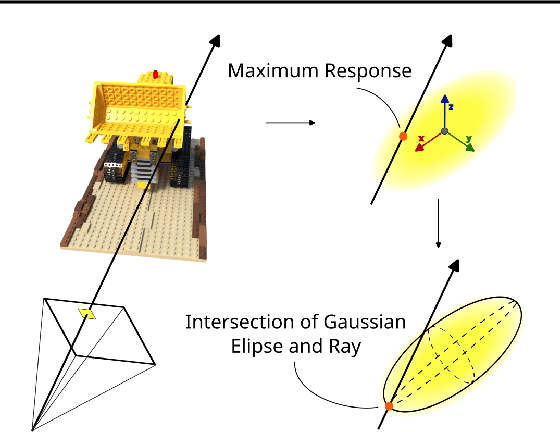

3D Gaussian Splatting (3DGS) is a process that enables the direct creation of 3D objects from 2D images. This representation offers numerous advantages, including rapid training and rendering. However, a significant limitation of 3DGS is the challenge of incorporating light and shadow reflections, primarily due to the utilization of rasterization rather than ray tracing for rendering. This paper introduces RaySplats, a model that employs ray-tracing based Gaussian Splatting. Rather than utilizing the projection of Gaussians, our method employs a ray-tracing mechanism, operating directly on Gaussian primitives represented by confidence ellipses with RGB colors. In practice, we compute the intersection between ellipses and rays to construct ray-tracing algorithms, facilitating the incorporation of meshes with Gaussian Splatting models and the addition of lights, shadows, and other related effects.
Accelerating Goal-Conditioned RL Algorithms and Research
Aug 20, 2024Self-supervision has the potential to transform reinforcement learning (RL), paralleling the breakthroughs it has enabled in other areas of machine learning. While self-supervised learning in other domains aims to find patterns in a fixed dataset, self-supervised goal-conditioned reinforcement learning (GCRL) agents discover new behaviors by learning from the goals achieved during unstructured interaction with the environment. However, these methods have failed to see similar success, both due to a lack of data from slow environments as well as a lack of stable algorithms. We take a step toward addressing both of these issues by releasing a high-performance codebase and benchmark JaxGCRL for self-supervised GCRL, enabling researchers to train agents for millions of environment steps in minutes on a single GPU. The key to this performance is a combination of GPU-accelerated environments and a stable, batched version of the contrastive reinforcement learning algorithm, based on an infoNCE objective, that effectively makes use of this increased data throughput. With this approach, we provide a foundation for future research in self-supervised GCRL, enabling researchers to quickly iterate on new ideas and evaluate them in a diverse set of challenging environments. Website + Code: https://github.com/MichalBortkiewicz/JaxGCRL