 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Shall I Be Empathetic? The Utility of Empathetic Parameter Estimation in Multi-Agent Interactions
Nov 03, 2020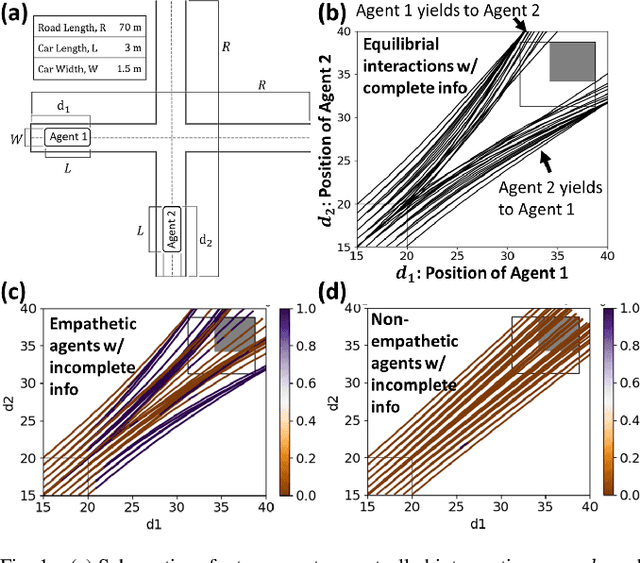
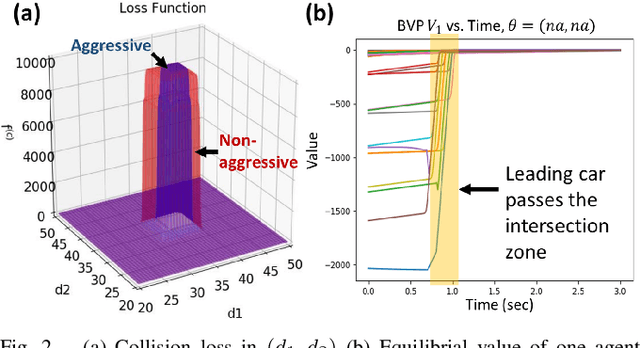
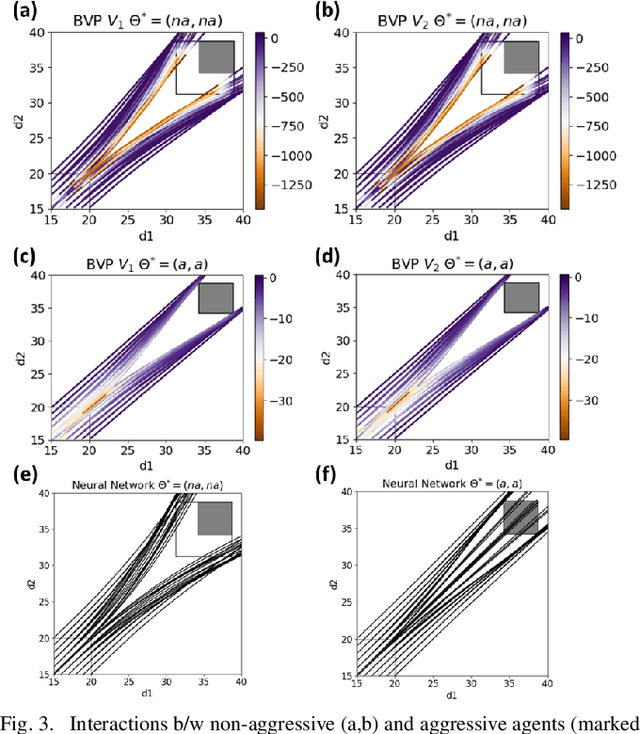
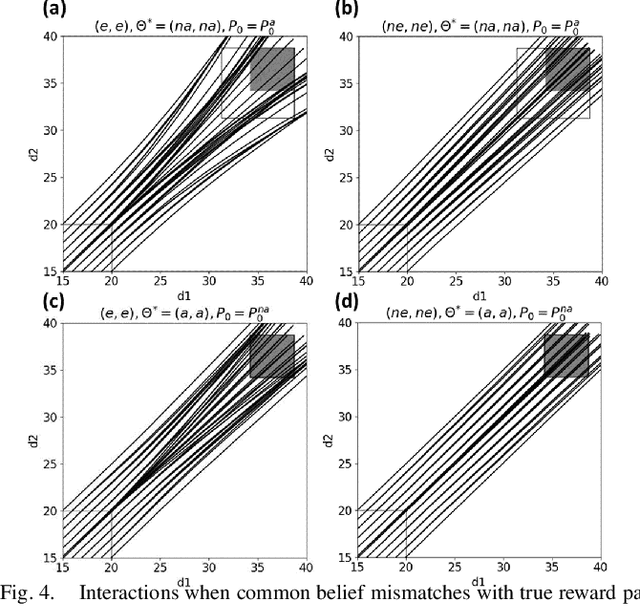
Human-robot interactions (HRI) can be modeled as dynamic or differential games with incomplete information, where each agent holds private reward parameters. Due to the open challenge in finding perfect Bayesian equilibria of such games, existing studies often consider approximated solutions composed of parameter estimation and motion planning steps, in order to decouple the belief and physical dynamics. In parameter estimation, current approaches often assume that the reward parameters of the robot are known by the humans. We argue that by falsely conditioning on this assumption, the robot performs non-empathetic estimation of the humans' parameters, leading to undesirable values even in the simplest interactions. We test this argument by studying a two-vehicle uncontrolled intersection case with short reaction time. Results show that when both agents are unknowingly aggressive (or non-aggressive), empathy leads to more effective parameter estimation and higher reward values, suggesting that empathy is necessary when the true parameters of agents mismatch with their common belief. The proposed estimation and planning algorithms are therefore more robust than the existing approaches, by fully acknowledging the nature of information asymmetry in HRI. Lastly, we introduce value approximation techniques for real-time execution of the proposed algorithms.
Task-assisted Motion Planning in Partially Observable Domains
Aug 27, 2019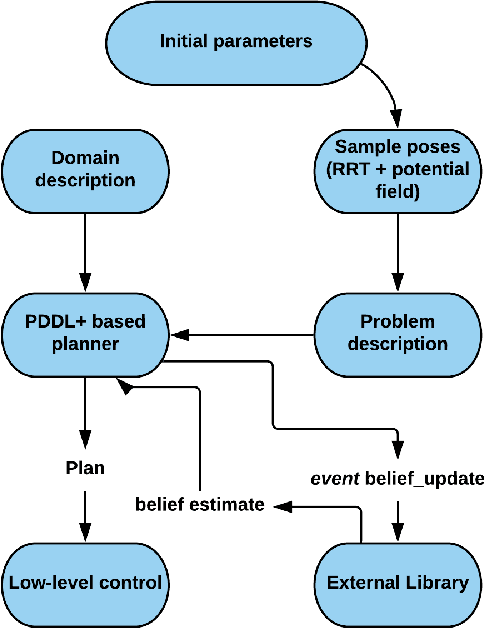
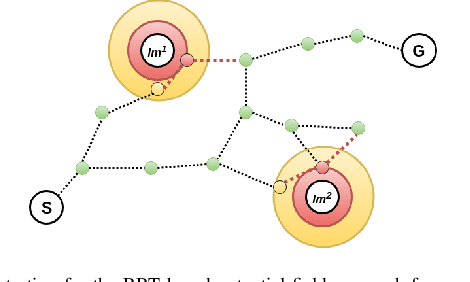
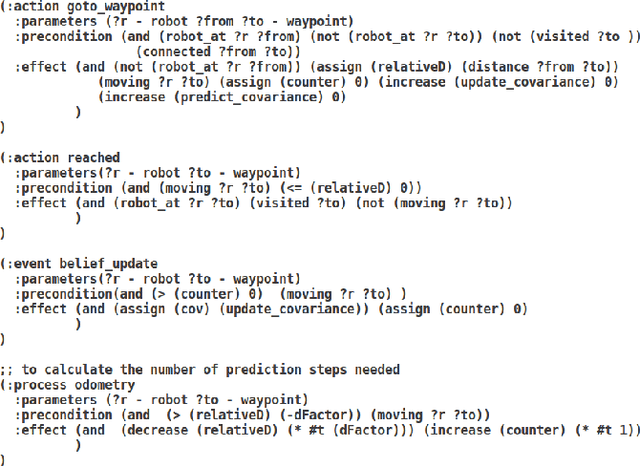
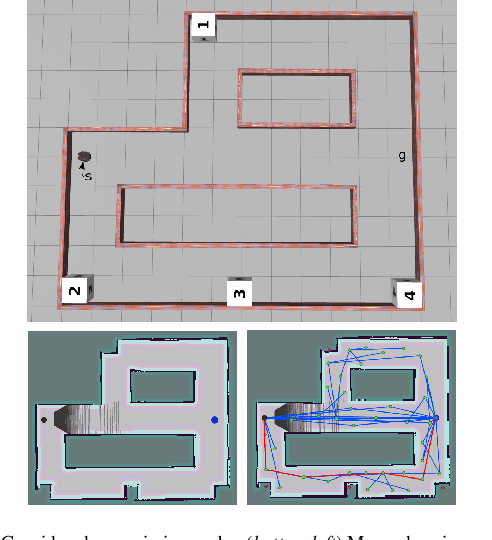
We present an integrated Task-Motion Planning framework for robot navigation in belief space. Autonomous robots operating in real world complex scenarios require planning in the discrete (task) space and the continuous (motion) space. To this end, we propose a framework for integrating belief space reasoning within a hybrid task planner. The expressive power of PDDL+ combined with heuristic-driven semantic attachments performs the propagated and posterior belief estimates while planning. The underlying methodology for the development of the combined hybrid planner is discussed, providing suggestions for improvements and future work. Furthermore we validate key aspects of our approach using a realistic scenario in simulation.