 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocally Optimal Solutions to Constraint Displacement Problems via Path-Obstacle Overlaps
Nov 15, 2025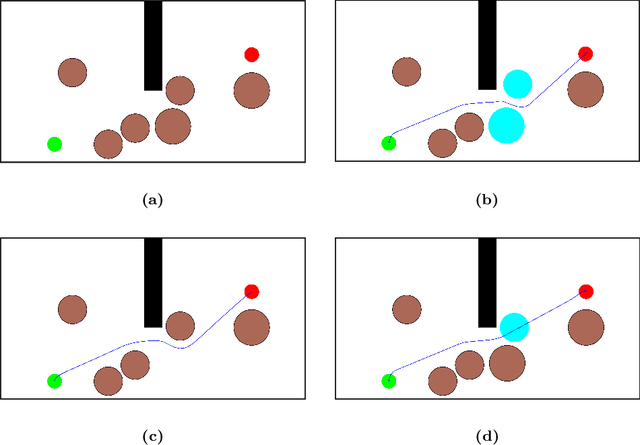
We present a unified approach for constraint displacement problems in which a robot finds a feasible path by displacing constraints or obstacles. To this end, we propose a two stage process that returns locally optimal obstacle displacements to enable a feasible path for the robot. The first stage proceeds by computing a trajectory through the obstacles while minimizing an appropriate objective function. In the second stage, these obstacles are displaced to make the computed robot trajectory feasible, that is, collision-free. Several examples are provided that successfully demonstrate our approach on two distinct classes of constraint displacement problems.
An Incremental Sampling and Segmentation-Based Approach for Motion Planning Infeasibility
Jan 20, 2025We present a simple and easy-to-implement algorithm to detect plan infeasibility in kinematic motion planning. Our method involves approximating the robot's configuration space to a discrete space, where each degree of freedom has a finite set of values. The obstacle region separates the free configuration space into different connected regions. For a path to exist between the start and goal configurations, they must lie in the same connected region of the free space. Thus, to ascertain plan infeasibility, we merely need to sample adequate points from the obstacle region that isolate start and goal. Accordingly, we progressively construct the configuration space by sampling from the discretized space and updating the bitmap cells representing obstacle regions. Subsequently, we partition this partially built configuration space to identify different connected components within it and assess the connectivity of the start and goal cells. We illustrate this methodology on five different scenarios with configuration spaces having up to 5 degree-of-freedom (DOF).
Safe motion planning with environment uncertainty
May 10, 2023



We present an approach for safe motion planning under robot state and environment (obstacle and landmark location) uncertainties. To this end, we first develop an approach that accounts for the landmark uncertainties during robot localization. Existing planning approaches assume that the landmark locations are well known or are known with little uncertainty. However, this might not be true in practice. Noisy sensors and imperfect motions compound to the errors originating from the estimate of environment features. Moreover, possible occlusions and dynamic objects in the environment render imperfect landmark estimation. Consequently, not considering this uncertainty can wrongly localize the robot, leading to inefficient plans. Our approach thus incorporates the landmark uncertainty within the Bayes filter estimation framework. We also analyze the effect of considering this uncertainty and delineate the conditions under which it can be ignored. Second, we extend the state-of-the-art by computing an exact expression for the collision probability under Gaussian distributed robot motion, perception and obstacle location uncertainties. We formulate the collision probability process as a quadratic form in random variables. Under Gaussian distribution assumptions, an exact expression for collision probability is thus obtained which is computable in real-time. In contrast, existing approaches approximate the collision probability using upper-bounds that can lead to overly conservative estimate and thereby suboptimal plans. We demonstrate and evaluate our approach using a theoretical example and simulations. We also present a comparison of our approach to different state-of-the-art methods.
* arXiv admin note: text overlap with arXiv:2101.11566
Revisiting the Minimum Constraint Removal Problem in Mobile Robotics
May 02, 2023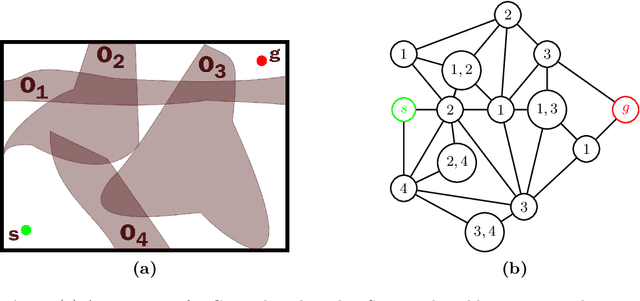

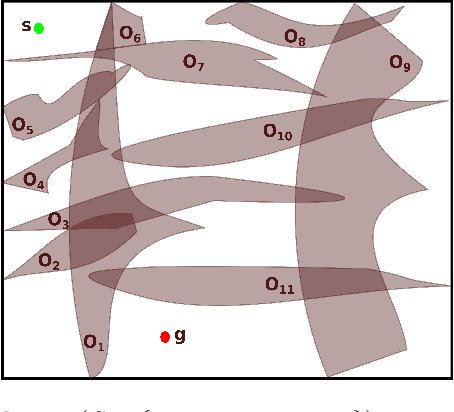
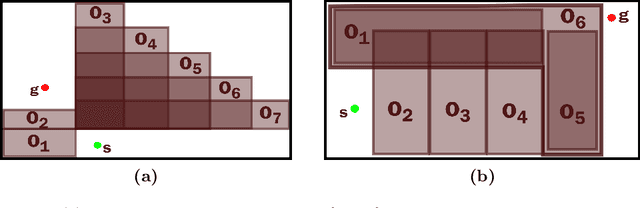
The minimum constraint removal problem seeks to find the minimum number of constraints, i.e., obstacles, that need to be removed to connect a start to a goal location with a collision-free path. This problem is NP-hard and has been studied in robotics, wireless sensing, and computational geometry. This work contributes to the existing literature by presenting and discussing two results. The first result shows that the minimum constraint removal is NP-hard for simply connected obstacles where each obstacle intersects a constant number of other obstacles. The second result demonstrates that for $n$ simply connected obstacles in the plane, instances of the minimum constraint removal problem with minimum removable obstacles lower than $(n+1)/3$ can be solved in polynomial time. This result is also empirically validated using several instances of randomly sampled axis-parallel rectangles.
Exact and Bounded Collision Probability for Motion Planning under Gaussian Uncertainty
Oct 12, 2021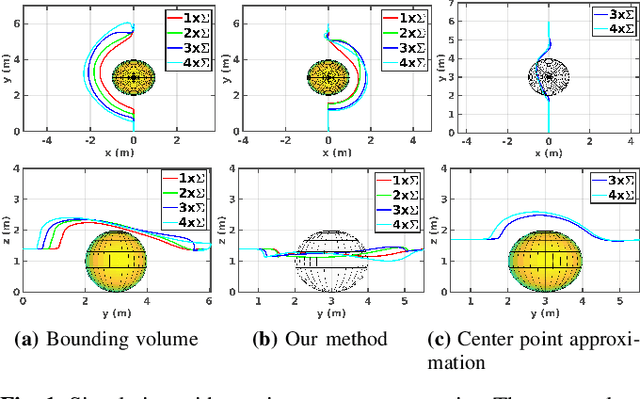

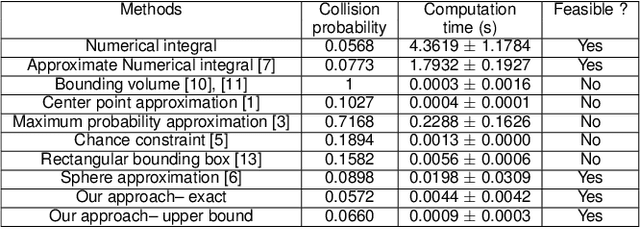

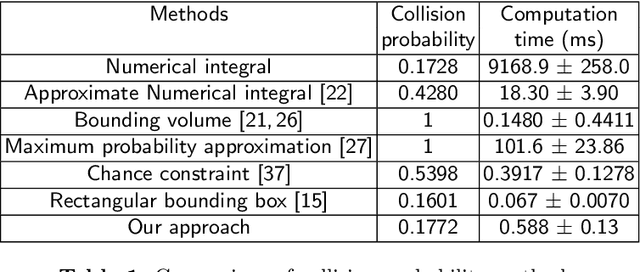
Computing collision-free trajectories is of prime importance for safe navigation. We present an approach for computing the collision probability under Gaussian distributed motion and sensing uncertainty with the robot and static obstacle shapes approximated as ellipsoids. The collision condition is formulated as the distance between ellipsoids and unlike previous approaches we provide a method for computing the exact collision probability. Furthermore, we provide a tight upper bound that can be computed much faster during online planning. Comparison to other state-of-the-art methods is also provided. The proposed method is evaluated in simulation under varying configuration and number of obstacles.
MPTP: Motion-Planning-aware Task Planning for Navigation in Belief Space
Apr 10, 2021
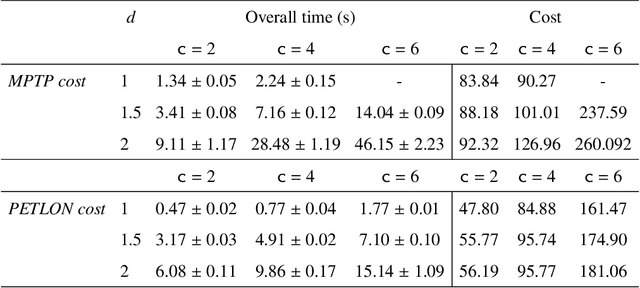
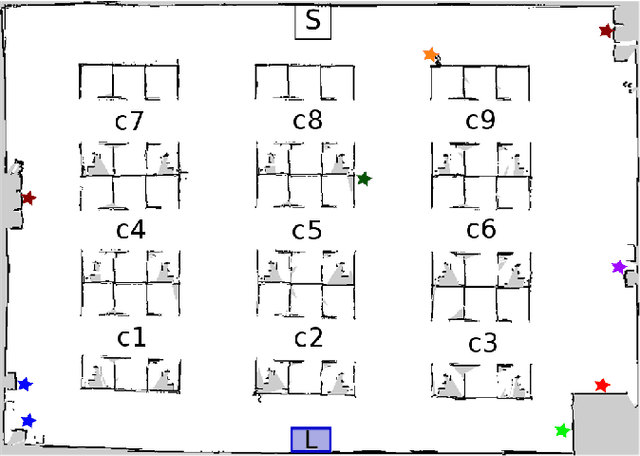
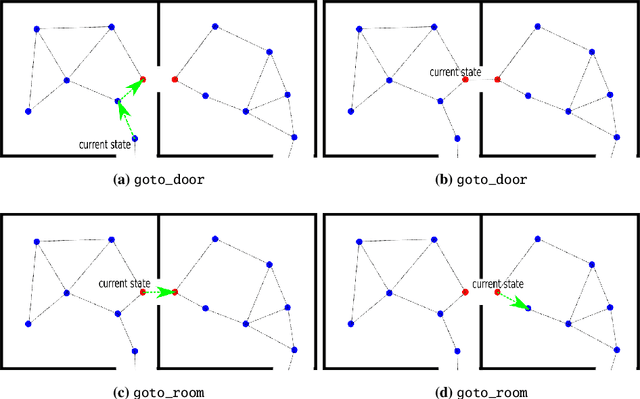
We present an integrated Task-Motion Planning (TMP) framework for navigation in large-scale environments. Of late, TMP for manipulation has attracted significant interest resulting in a proliferation of different approaches. In contrast, TMP for navigation has received considerably less attention. Autonomous robots operating in real-world complex scenarios require planning in the discrete (task) space and the continuous (motion) space. In knowledge-intensive domains, on the one hand, a robot has to reason at the highest-level, for example, the objects to procure, the regions to navigate to in order to acquire them; on the other hand, the feasibility of the respective navigation tasks have to be checked at the execution level. This presents a need for motion-planning-aware task planners. In this paper, we discuss a probabilistically complete approach that leverages this task-motion interaction for navigating in large knowledge-intensive domains, returning a plan that is optimal at the task-level. The framework is intended for motion planning under motion and sensing uncertainty, which is formally known as belief space planning. The underlying methodology is validated in simulation, in an office environment and its scalability is tested in the larger Willow Garage world. A reasonable comparison with a work that is closest to our approach is also provided. We also demonstrate the adaptability of our approach by considering a building floor navigation domain. Finally, we also discuss the limitations of our approach and put forward suggestions for improvements and future work.
Probabilistic Collision Constraint for Motion Planning in Dynamic Environments
Apr 04, 2021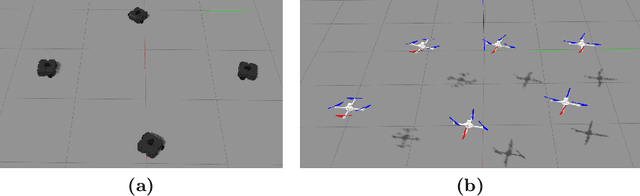

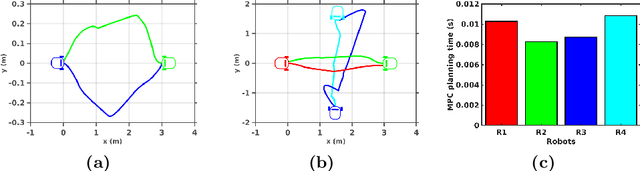
Online generation of collision free trajectories is of prime importance for autonomous navigation. Dynamic environments, robot motion and sensing uncertainties adds further challenges to collision avoidance systems. This paper presents an approach for collision avoidance in dynamic environments, incorporating robot and obstacle state uncertainties. We derive a tight upper bound for collision probability between robot and obstacle and formulate it as a motion planning constraint which is solvable in real time. The proposed approach is tested in simulation considering mobile robots as well as quadrotors to demonstrate that successful collision avoidance is achieved in real time application. We also provide a comparison of our approach with several state-of-the-art methods.
An Integrated Localisation, Motion Planning and Obstacle Avoidance Algorithm in Belief Space
Jan 27, 2021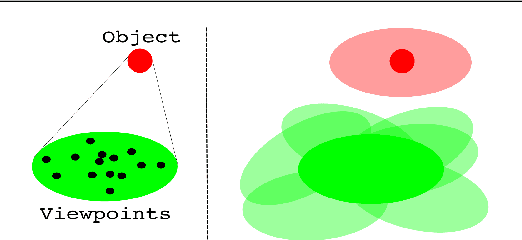
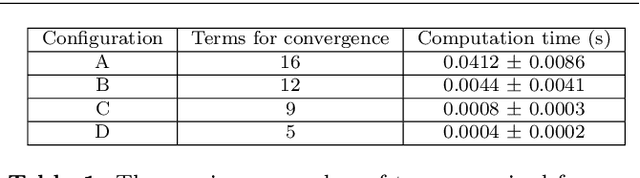
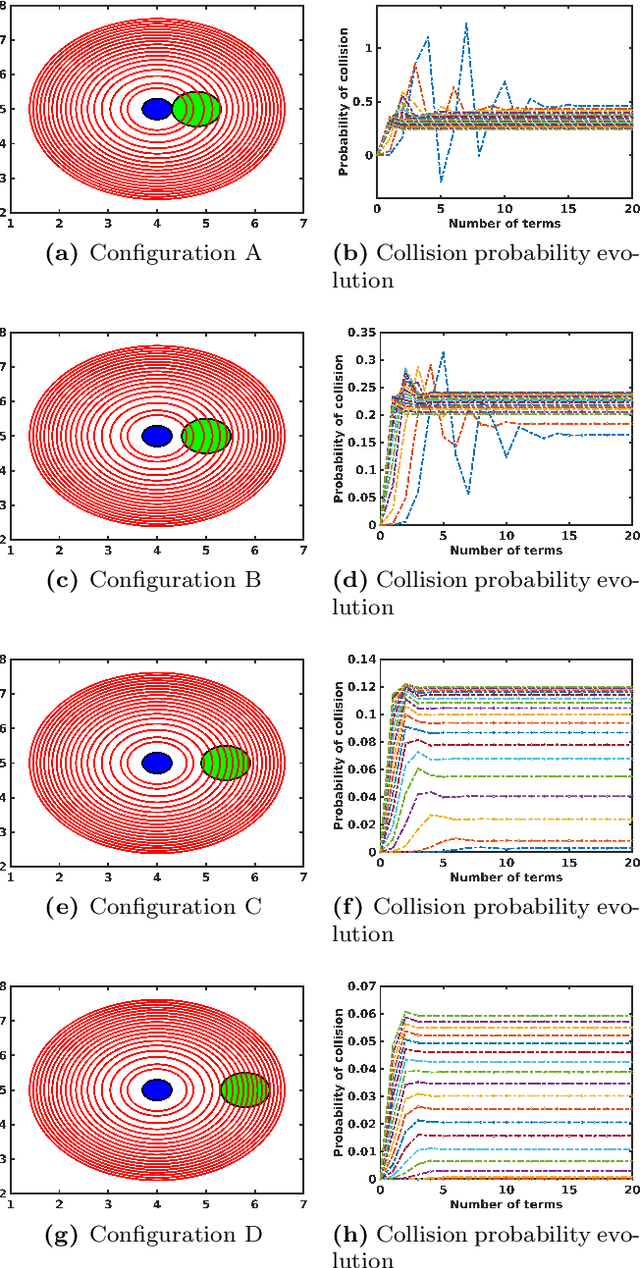
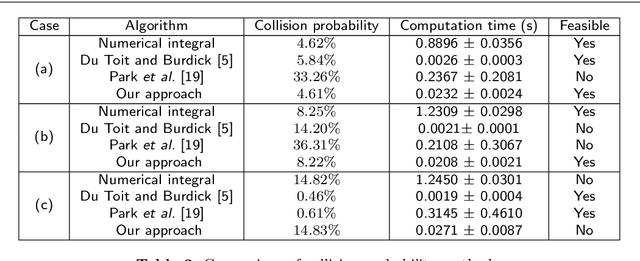
As robots are being increasingly used in close proximity to humans and objects, it is imperative that robots operate safely and efficiently under real-world conditions. Yet, the environment is seldom known perfectly. Noisy sensors and actuation errors compound to the errors introduced while estimating features of the environment. We present a novel approach (1) to incorporate these uncertainties for robot state estimation and (2) to compute the probability of collision pertaining to the estimated robot configurations. The expression for collision probability is obtained as an infinite series and we prove its convergence. An upper bound for the truncation error is also derived and the number of terms required is demonstrated by analyzing the convergence for different robot and obstacle configurations. We evaluate our approach using two simulation domains which use a roadmap-based strategy to synthesize trajectories that satisfy collision probability bounds.
Towards Multi-Robot Task-Motion Planning for Navigation in Belief Space
Oct 01, 2020



Autonomous robots operating in large knowledgeintensive domains require planning in the discrete (task) space and the continuous (motion) space. In knowledge-intensive domains, on the one hand, robots have to reason at the highestlevel, for example the regions to navigate to or objects to be picked up and their properties; on the other hand, the feasibility of the respective navigation tasks have to be checked at the controller execution level. Moreover, employing multiple robots offer enhanced performance capabilities over a single robot performing the same task. To this end, we present an integrated multi-robot task-motion planning framework for navigation in knowledge-intensive domains. In particular, we consider a distributed multi-robot setting incorporating mutual observations between the robots. The framework is intended for motion planning under motion and sensing uncertainty, which is formally known as belief space planning. The underlying methodology and its limitations are discussed, providing suggestions for improvements and future work. We validate key aspects of our approach in simulation.
Task-Motion Planning for Navigation in Belief Space
Oct 24, 2019We present an integrated Task-Motion Planning (TMP) framework for navigation in large-scale environment. Autonomous robots operating in real world complex scenarios require planning in the discrete (task) space and the continuous (motion) space. In knowledge intensive domains, on the one hand, a robot has to reason at the highest-level, for example the regions to navigate to; on the other hand, the feasibility of the respective navigation tasks have to be checked at the execution level. This presents a need for motion-planning-aware task planners. We discuss a probabilistically complete approach that leverages this task-motion interaction for navigating in indoor domains, returning a plan that is optimal at the task-level. Furthermore, our framework is intended for motion planning under motion and sensing uncertainty, which is formally known as belief space planning. The underlying methodology is validated with a simulated office environment in Gazebo. In addition, we discuss the limitations and provide suggestions for improvements and future work.