 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Integrated Localisation, Motion Planning and Obstacle Avoidance Algorithm in Belief Space
Paper and Code
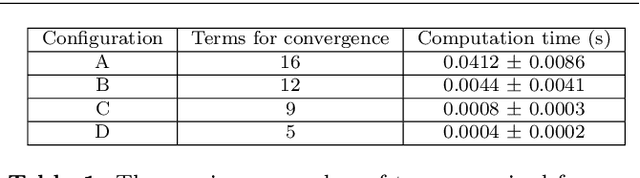
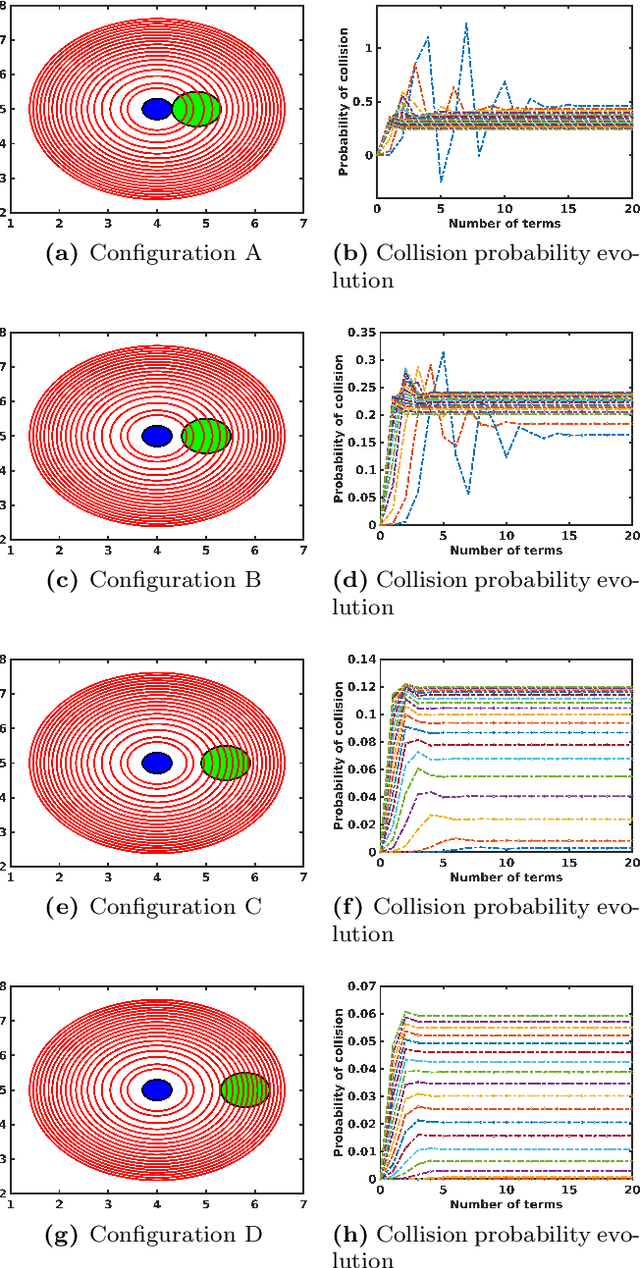
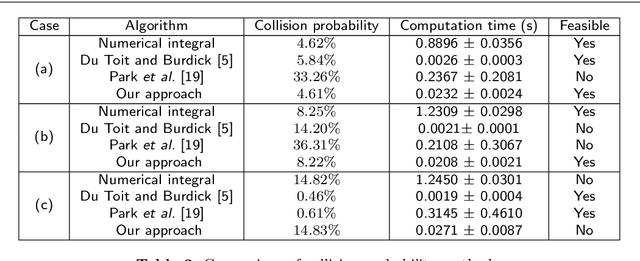
As robots are being increasingly used in close proximity to humans and objects, it is imperative that robots operate safely and efficiently under real-world conditions. Yet, the environment is seldom known perfectly. Noisy sensors and actuation errors compound to the errors introduced while estimating features of the environment. We present a novel approach (1) to incorporate these uncertainties for robot state estimation and (2) to compute the probability of collision pertaining to the estimated robot configurations. The expression for collision probability is obtained as an infinite series and we prove its convergence. An upper bound for the truncation error is also derived and the number of terms required is demonstrated by analyzing the convergence for different robot and obstacle configurations. We evaluate our approach using two simulation domains which use a roadmap-based strategy to synthesize trajectories that satisfy collision probability bounds.