 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepSim: A Reinforcement Learning Environment Build Toolkit for ROS and Gazebo
May 17, 2022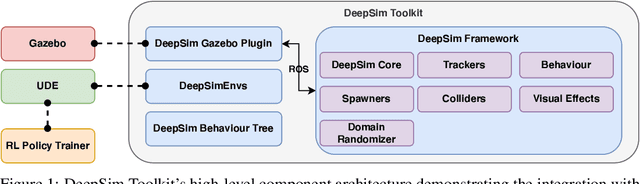
We propose DeepSim, a reinforcement learning environment build toolkit for ROS and Gazebo. It allows machine learning or reinforcement learning researchers to access the robotics domain and create complex and challenging custom tasks in ROS and Gazebo simulation environments. This toolkit provides building blocks of advanced features such as collision detection, behaviour control, domain randomization, spawner, and many more. DeepSim is designed to reduce the boundary between robotics and machine learning communities by providing Python interface. In this paper, we discuss the components and design decisions of DeepSim Toolkit.
Unified Distributed Environment
May 14, 2022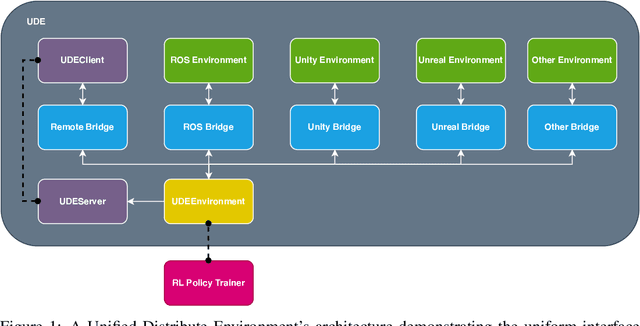
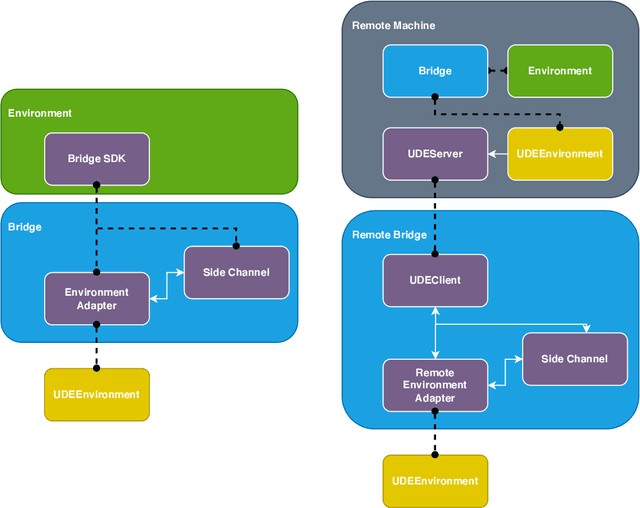
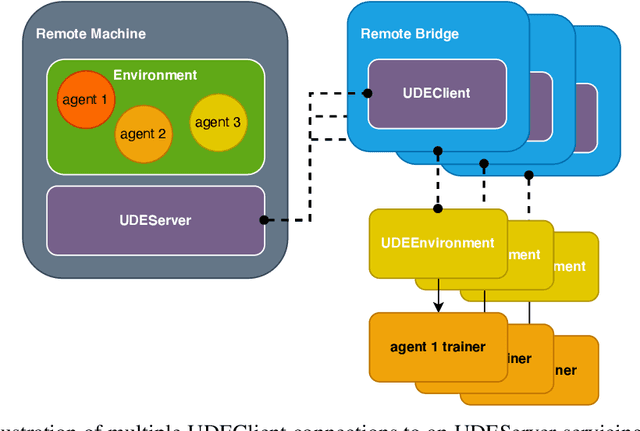

We propose Unified Distributed Environment (UDE), an environment virtualization toolkit for reinforcement learning research. UDE is designed to integrate environments built on any simulation platform such as Gazebo, Unity, Unreal, and OpenAI Gym. Through environment virtualization, UDE enables offloading the environment for execution on a remote machine while still maintaining a unified interface. The UDE interface is designed to support multi-agent by default. With environment virtualization and its interface design, the agent policies can be trained in multiple machines for a multi-agent environment. Furthermore, UDE supports integration with existing major RL toolkits for researchers to leverage the benefits. This paper discusses the components of UDE and its design decisions.
DeepRacer: Educational Autonomous Racing Platform for Experimentation with Sim2Real Reinforcement Learning
Nov 05, 2019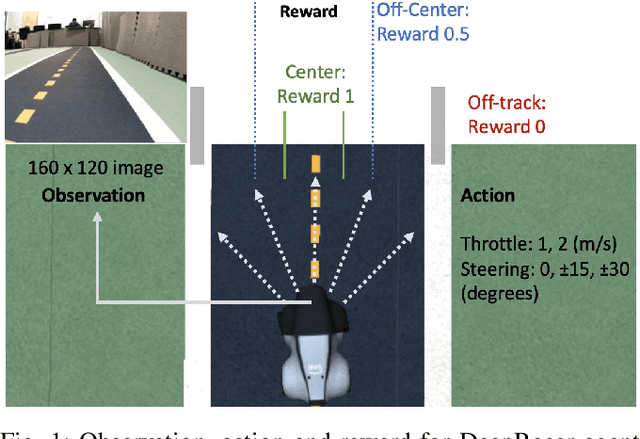
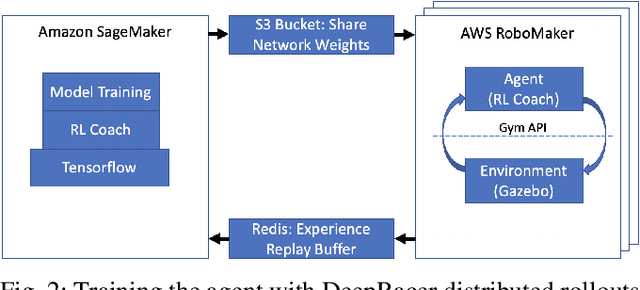
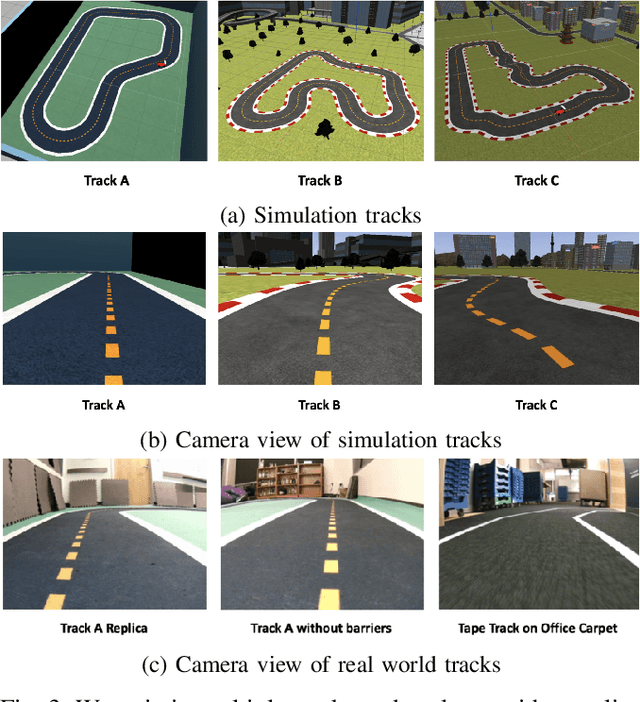
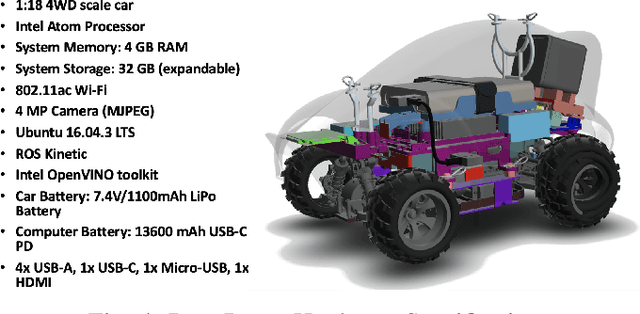
DeepRacer is a platform for end-to-end experimentation with RL and can be used to systematically investigate the key challenges in developing intelligent control systems. Using the platform, we demonstrate how a 1/18th scale car can learn to drive autonomously using RL with a monocular camera. It is trained in simulation with no additional tuning in physical world and demonstrates: 1) formulation and solution of a robust reinforcement learning algorithm, 2) narrowing the reality gap through joint perception and dynamics, 3) distributed on-demand compute architecture for training optimal policies, and 4) a robust evaluation method to identify when to stop training. It is the first successful large-scale deployment of deep reinforcement learning on a robotic control agent that uses only raw camera images as observations and a model-free learning method to perform robust path planning. We open source our code and video demo on GitHub: https://git.io/fjxoJ.