 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepSim: A Reinforcement Learning Environment Build Toolkit for ROS and Gazebo
May 17, 2022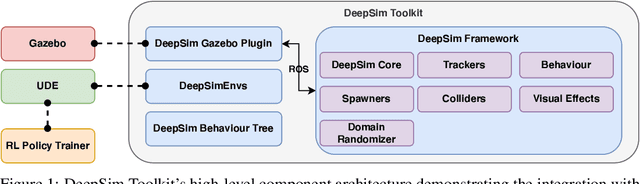
We propose DeepSim, a reinforcement learning environment build toolkit for ROS and Gazebo. It allows machine learning or reinforcement learning researchers to access the robotics domain and create complex and challenging custom tasks in ROS and Gazebo simulation environments. This toolkit provides building blocks of advanced features such as collision detection, behaviour control, domain randomization, spawner, and many more. DeepSim is designed to reduce the boundary between robotics and machine learning communities by providing Python interface. In this paper, we discuss the components and design decisions of DeepSim Toolkit.
Unified Distributed Environment
May 14, 2022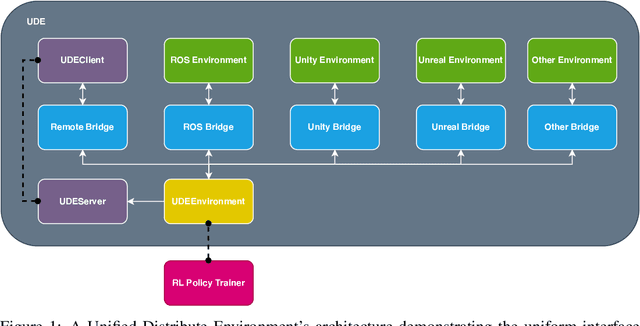
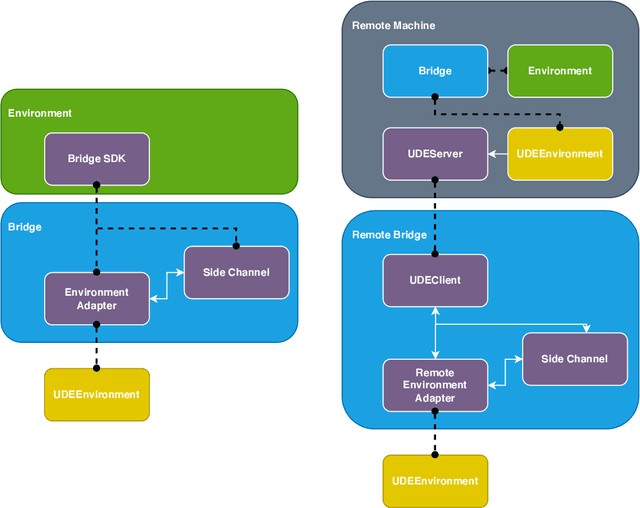
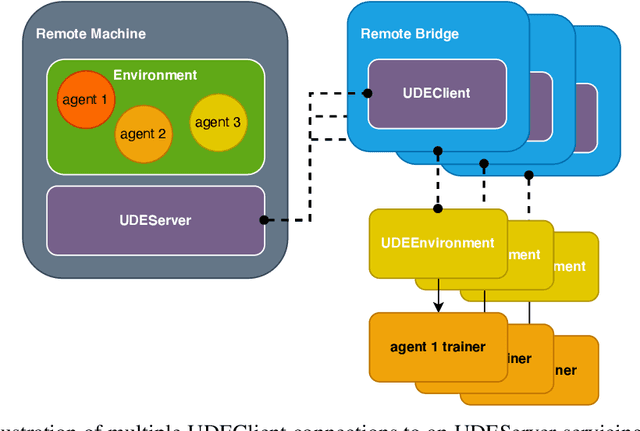

We propose Unified Distributed Environment (UDE), an environment virtualization toolkit for reinforcement learning research. UDE is designed to integrate environments built on any simulation platform such as Gazebo, Unity, Unreal, and OpenAI Gym. Through environment virtualization, UDE enables offloading the environment for execution on a remote machine while still maintaining a unified interface. The UDE interface is designed to support multi-agent by default. With environment virtualization and its interface design, the agent policies can be trained in multiple machines for a multi-agent environment. Furthermore, UDE supports integration with existing major RL toolkits for researchers to leverage the benefits. This paper discusses the components of UDE and its design decisions.