 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement World Model Learning for LLM-based Agents
Feb 05, 2026Large language models (LLMs) have achieved strong performance in language-centric tasks. However, in agentic settings, LLMs often struggle to anticipate action consequences and adapt to environment dynamics, highlighting the need for world-modeling capabilities in LLM-based agents. We propose Reinforcement World Model Learning (RWML), a self-supervised method that learns action-conditioned world models for LLM-based agents on textual states using sim-to-real gap rewards. Our method aligns simulated next states produced by the model with realized next states observed from the environment, encouraging consistency between internal world simulations and actual environment dynamics in a pre-trained embedding space. Unlike next-state token prediction, which prioritizes token-level fidelity (i.e., reproducing exact wording) over semantic equivalence and can lead to model collapse, our method provides a more robust training signal and is empirically less susceptible to reward hacking than LLM-as-a-judge. We evaluate our method on ALFWorld and $τ^2$ Bench and observe significant gains over the base model, despite being entirely self-supervised. When combined with task-success rewards, our method outperforms direct task-success reward RL by 6.9 and 5.7 points on ALFWorld and $τ^2$ Bench respectively, while matching the performance of expert-data training.
AgentRx: Diagnosing AI Agent Failures from Execution Trajectories
Feb 02, 2026AI agents often fail in ways that are difficult to localize because executions are probabilistic, long-horizon, multi-agent, and mediated by noisy tool outputs. We address this gap by manually annotating failed agent runs and release a novel benchmark of 115 failed trajectories spanning structured API workflows, incident management, and open-ended web/file tasks. Each trajectory is annotated with a critical failure step and a category from a grounded-theory derived, cross-domain failure taxonomy. To mitigate the human cost of failure attribution, we present AGENTRX, an automated domain-agnostic diagnostic framework that pinpoints the critical failure step in a failed agent trajectory. It synthesizes constraints, evaluates them step-by-step, and produces an auditable validation log of constraint violations with associated evidence; an LLM-based judge uses this log to localize the critical step and category. Our framework improves step localization and failure attribution over existing baselines across three domains.
Dyna-Mind: Learning to Simulate from Experience for Better AI Agents
Oct 10, 2025



Reasoning models have recently shown remarkable progress in domains such as math and coding. However, their expert-level abilities in math and coding contrast sharply with their performance in long-horizon, interactive tasks such as web navigation and computer/phone-use. Inspired by literature on human cognition, we argue that current AI agents need ''vicarious trial and error'' - the capacity to mentally simulate alternative futures before acting - in order to enhance their understanding and performance in complex interactive environments. We introduce Dyna-Mind, a two-stage training framework that explicitly teaches (V)LM agents to integrate such simulation into their reasoning. In stage 1, we introduce Reasoning with Simulations (ReSim), which trains the agent to generate structured reasoning traces from expanded search trees built from real experience gathered through environment interactions. ReSim thus grounds the agent's reasoning in faithful world dynamics and equips it with the ability to anticipate future states in its reasoning. In stage 2, we propose Dyna-GRPO, an online reinforcement learning method to further strengthen the agent's simulation and decision-making ability by using both outcome rewards and intermediate states as feedback from real rollouts. Experiments on two synthetic benchmarks (Sokoban and ALFWorld) and one realistic benchmark (AndroidWorld) demonstrate that (1) ReSim effectively infuses simulation ability into AI agents, and (2) Dyna-GRPO leverages outcome and interaction-level signals to learn better policies for long-horizon, planning-intensive tasks. Together, these results highlight the central role of simulation in enabling AI agents to reason, plan, and act more effectively in the ever more challenging environments.
Building AI Agents for Autonomous Clouds: Challenges and Design Principles
Jul 16, 2024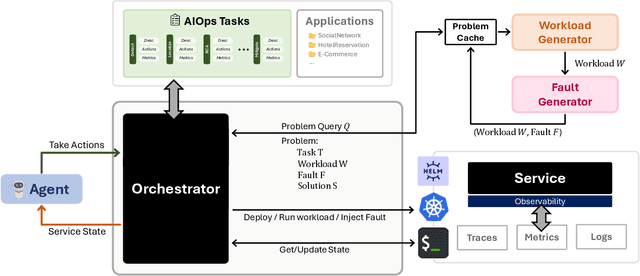
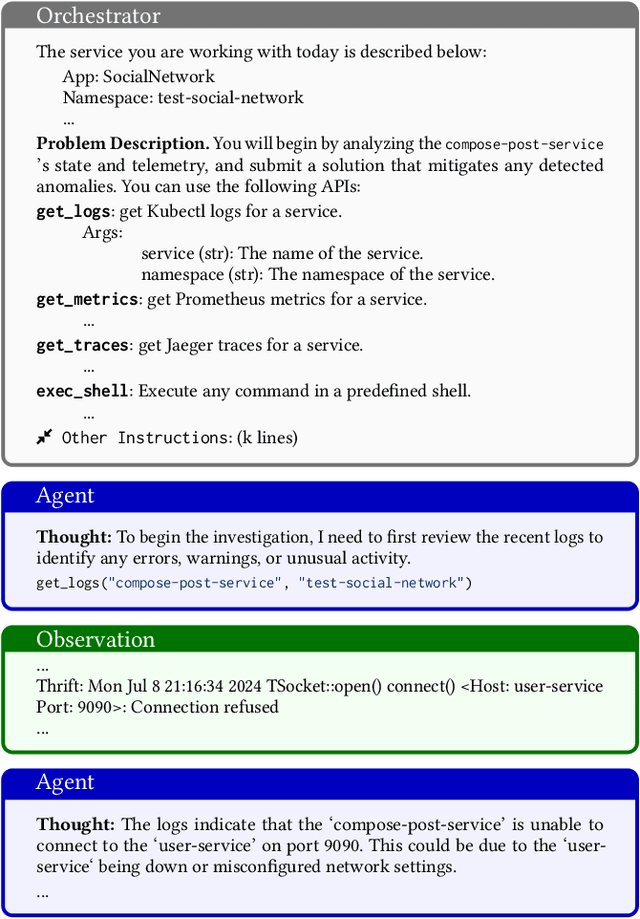
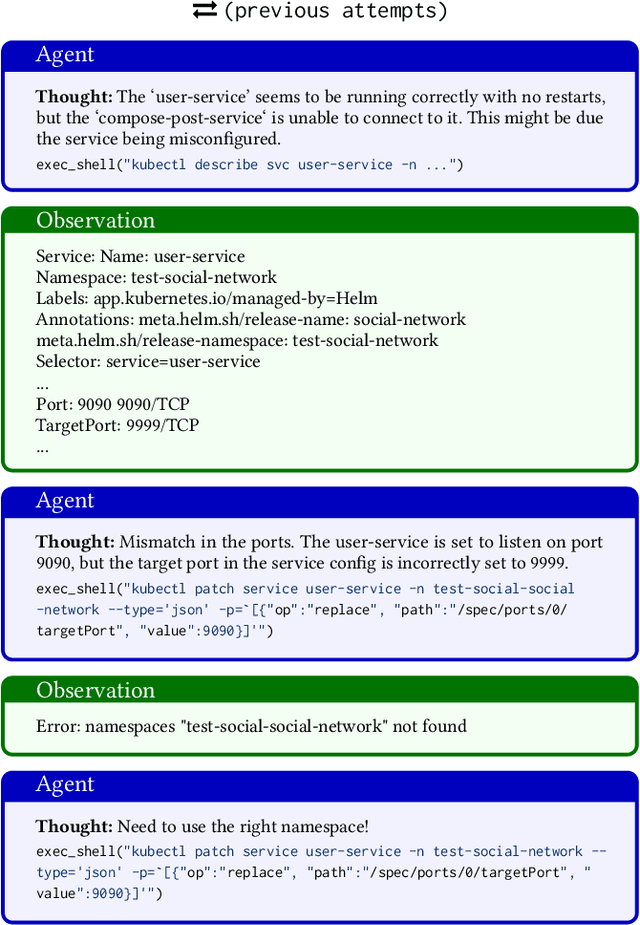
The rapid growth in the use of Large Language Models (LLMs) and AI Agents as part of software development and deployment is revolutionizing the information technology landscape. While code generation receives significant attention, a higher-impact application lies in using AI agents for operational resilience of cloud services, which currently require significant human effort and domain knowledge. There is a growing interest in AI for IT Operations (AIOps) which aims to automate complex operational tasks, like fault localization and root cause analysis, thereby reducing human intervention and customer impact. However, achieving the vision of autonomous and self-healing clouds though AIOps is hampered by the lack of standardized frameworks for building, evaluating, and improving AIOps agents. This vision paper lays the groundwork for such a framework by first framing the requirements and then discussing design decisions that satisfy them. We also propose AIOpsLab, a prototype implementation leveraging agent-cloud-interface that orchestrates an application, injects real-time faults using chaos engineering, and interfaces with an agent to localize and resolve the faults. We report promising results and lay the groundwork to build a modular and robust framework for building, evaluating, and improving agents for autonomous clouds.
Large-scale Crash Localization using Multi-Task Learning
Sep 29, 2021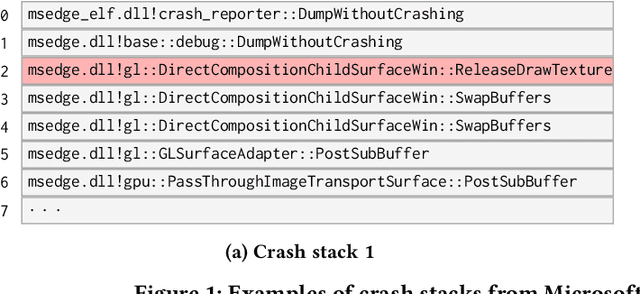

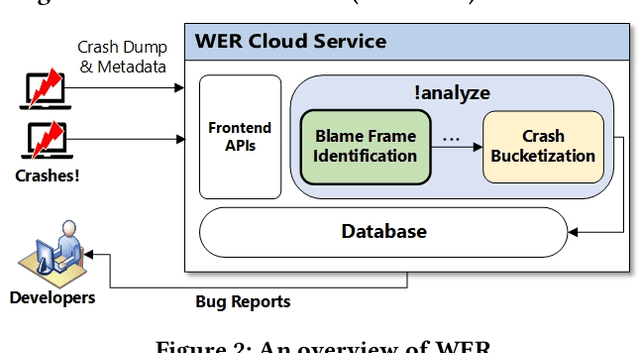
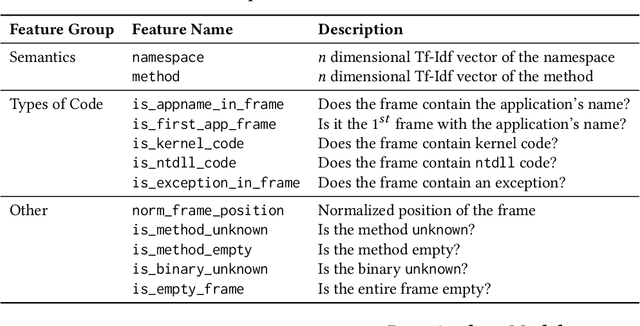
Crash localization, an important step in debugging crashes, is challenging when dealing with an extremely large number of diverse applications and platforms and underlying root causes. Large-scale error reporting systems, e.g., Windows Error Reporting (WER), commonly rely on manually developed rules and heuristics to localize blamed frames causing the crashes. As new applications and features are routinely introduced and existing applications are run under new environments, developing new rules and maintaining existing ones become extremely challenging. We propose a data-driven solution to address the problem. We start with the first large-scale empirical study of 362K crashes and their blamed methods reported to WER by tens of thousands of applications running in the field. The analysis provides valuable insights on where and how the crashes happen and what methods to blame for the crashes. These insights enable us to develop DeepAnalyze, a novel multi-task sequence labeling approach for identifying blamed frames in stack traces. We evaluate our model with over a million real-world crashes from four popular Microsoft applications and show that DeepAnalyze, trained with crashes from one set of applications, not only accurately localizes crashes of the same applications, but also bootstraps crash localization for other applications with zero to very little additional training data.