 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTabletop Object Rearrangement: Team ACRV's Entry to OCRTOC
Apr 15, 2021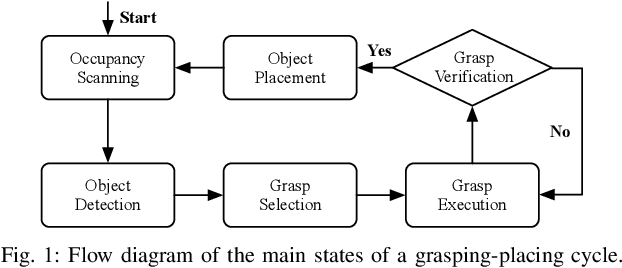
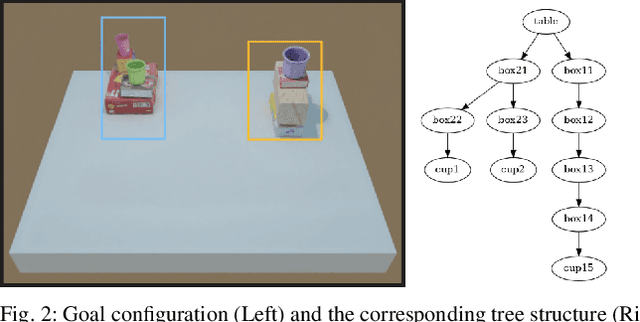
Open Cloud Robot Table Organization Challenge (OCRTOC) is one of the most comprehensive cloud-based robotic manipulation competitions. It focuses on rearranging tabletop objects using vision as its primary sensing modality. In this extended abstract, we present our entry to the OCRTOC2020 and the key challenges the team has experienced.
Recommendation System-based Upper Confidence Bound for Online Advertising
Sep 09, 2019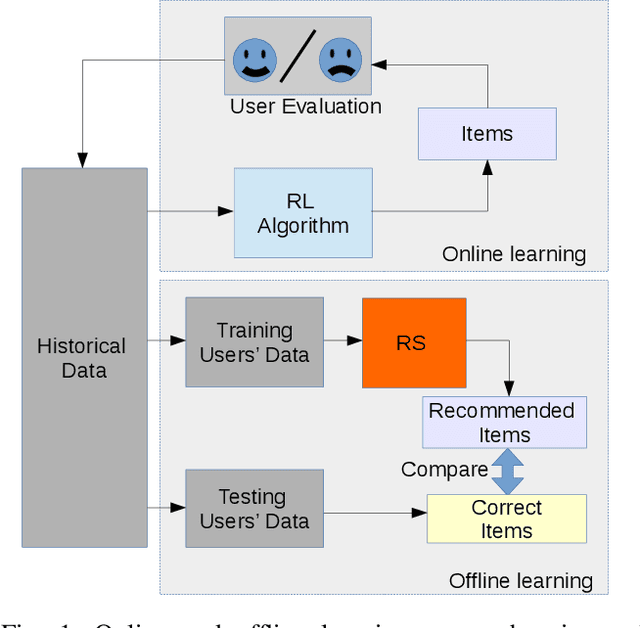
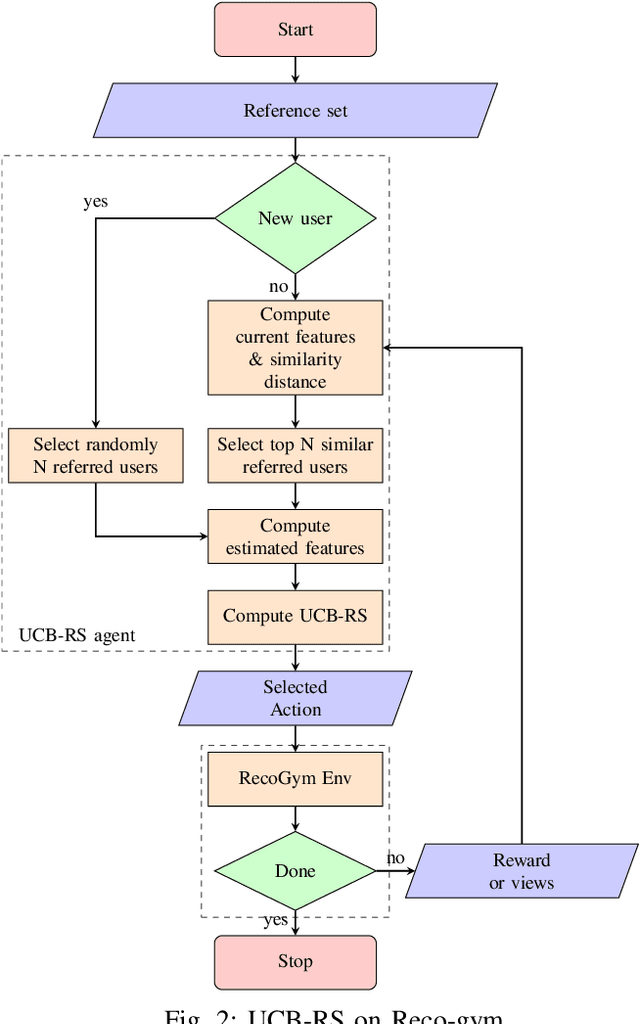
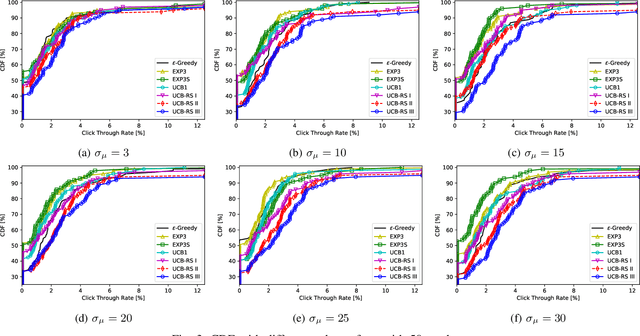
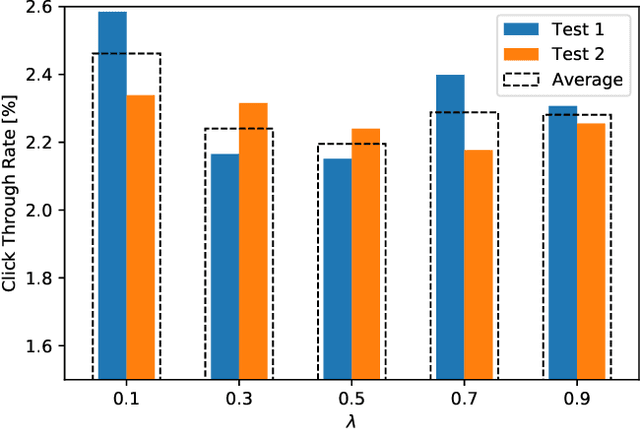
In this paper, the method UCB-RS, which resorts to recommendation system (RS) for enhancing the upper-confidence bound algorithm UCB, is presented. The proposed method is used for dealing with non-stationary and large-state spaces multi-armed bandit problems. The proposed method has been targeted to the problem of the product recommendation in the online advertising. Through extensive testing with RecoGym, an OpenAI Gym-based reinforcement learning environment for the product recommendation in online advertising, the proposed method outperforms the widespread reinforcement learning schemes such as $\epsilon$-Greedy, Upper Confidence (UCB1) and Exponential Weights for Exploration and Exploitation (EXP3).