 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Shortsighted Navigation: Merging Best View Trajectory Planning with Robot Navigation
Aug 22, 2024



Gathering visual information effectively to monitor known environments is a key challenge in robotics. To be as efficient as human surveyors, robotic systems must continuously collect observational data required to complete their survey task. Inspection personnel instinctively know to look at relevant equipment that happens to be ``along the way.'' In this paper, we introduce a novel framework for continuous long-horizon viewpoint planning, for ground robots, applied to tasks involving patrolling, monitoring or visual data gathering in known environments. Our approach to Long Horizon Viewpoint Planning (LHVP), enables the robot to autonomously navigate and collect environmental data optimizing for coverage over the horizon of the patrol. Leveraging a quadruped's mobility and sensory capabilities, our LHVP framework plans patrol paths that account for coupling the viewpoint planner for the arm camera with the mobile base's navigation planner. The viewpath optimization algorithm seeks a balance between comprehensive environmental coverage and dynamically feasible movements, thus ensuring prolonged and effective operation in scenarios including monitoring, security surveillance, and disaster response. We validate our approach through simulations and in the real world and show that our LHVP significantly outperforms naive patrolling methods in terms of area coverage generating information-gathering trajectories for the robot arm. Our results indicate a promising direction for the deployment of mobile robots in long-term, autonomous surveying, and environmental data collection tasks, highlighting the potential of intelligent robotic systems in challenging real-world applications.
Accelerating Trajectory Generation for Quadrotors Using Transformers
Mar 27, 2023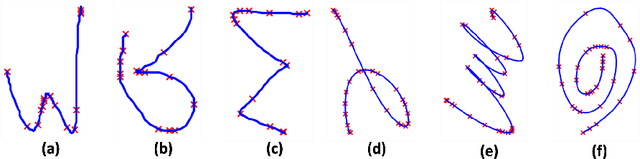
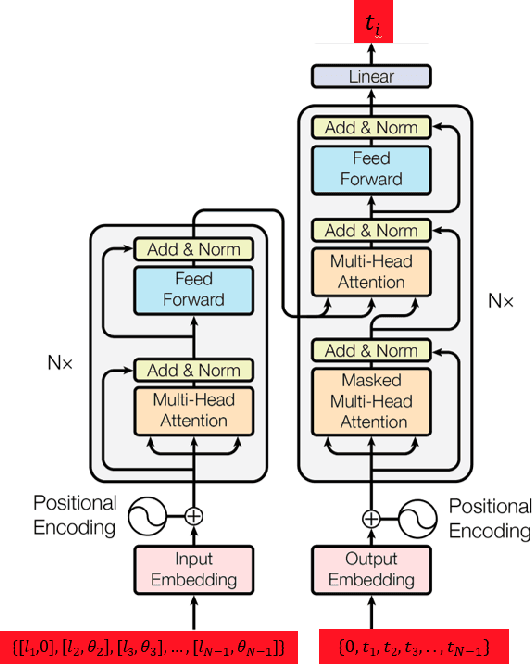
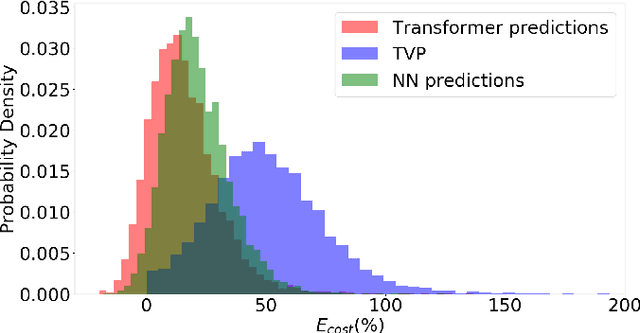
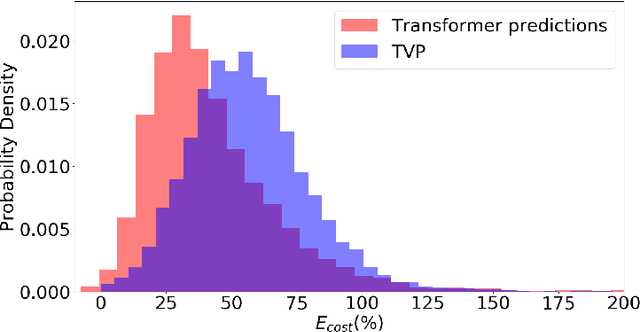
In this work, we address the problem of computation time for trajectory generation in quadrotors. Most trajectory generation methods for waypoint navigation of quadrotors, for example minimum snap/jerk and minimum-time, are structured as bi-level optimizations. The first level involves allocating time across all input waypoints and the second step is to minimize the snap/jerk of the trajectory under that time allocation. Such an optimization can be computationally expensive to solve. In our approach we treat trajectory generation as a supervised learning problem between a sequential set of inputs and outputs. We adapt a transformer model to learn the optimal time allocations for a given set of input waypoints, thus making it into a single step optimization. We demonstrate the performance of the transformer model by training it to predict the time allocations for a minimum snap trajectory generator. The trained transformer model is able to predict accurate time allocations with fewer data samples and smaller model size, compared to a feedforward network (FFN), demonstrating that it is able to model the sequential nature of the waypoint navigation problem.
Cross-utterance ASR Rescoring with Graph-based Label Propagation
Mar 27, 2023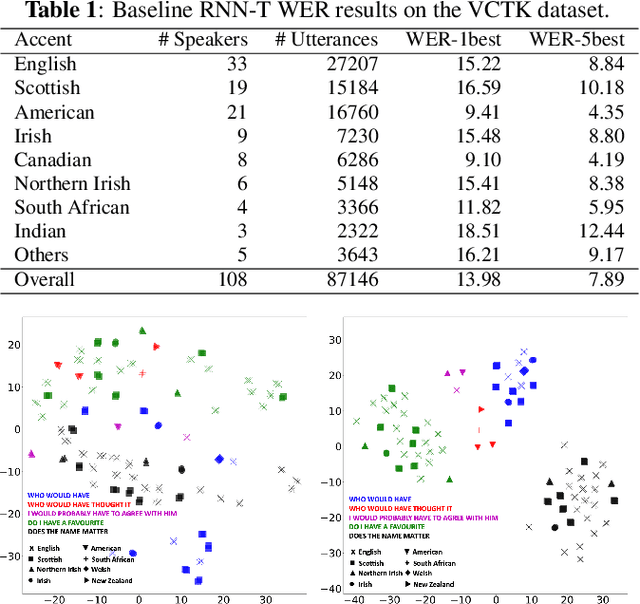
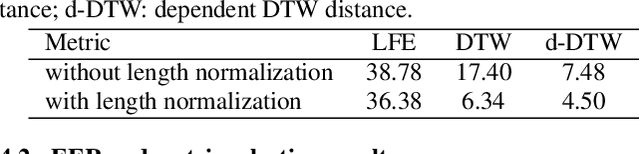
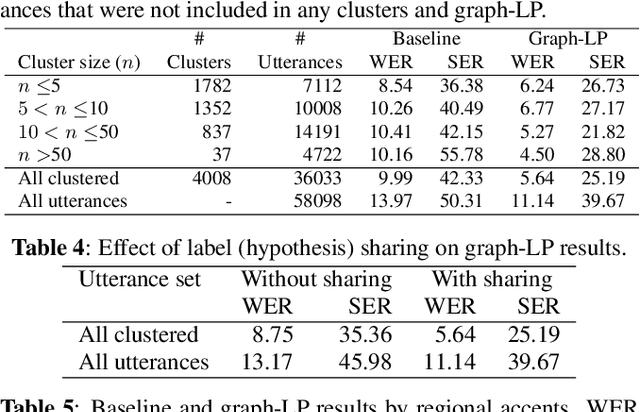
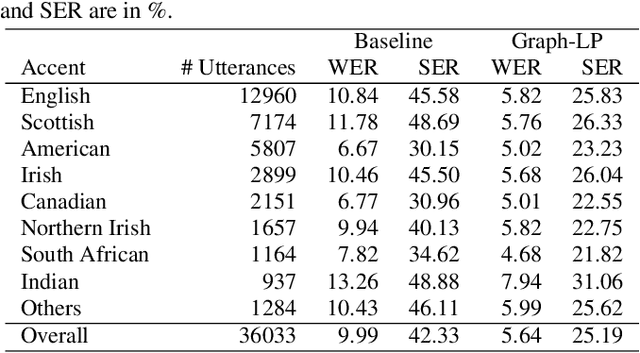
We propose a novel approach for ASR N-best hypothesis rescoring with graph-based label propagation by leveraging cross-utterance acoustic similarity. In contrast to conventional neural language model (LM) based ASR rescoring/reranking models, our approach focuses on acoustic information and conducts the rescoring collaboratively among utterances, instead of individually. Experiments on the VCTK dataset demonstrate that our approach consistently improves ASR performance, as well as fairness across speaker groups with different accents. Our approach provides a low-cost solution for mitigating the majoritarian bias of ASR systems, without the need to train new domain- or accent-specific models.
Smooth time optimal trajectory generation for drones
Feb 18, 2022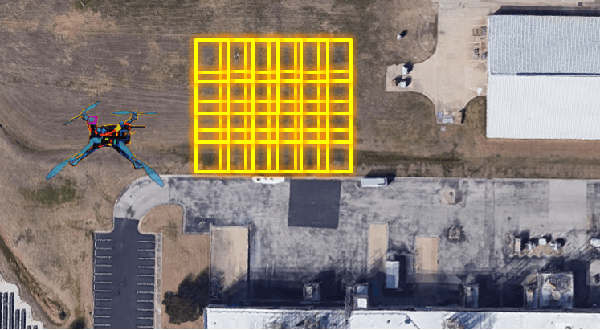

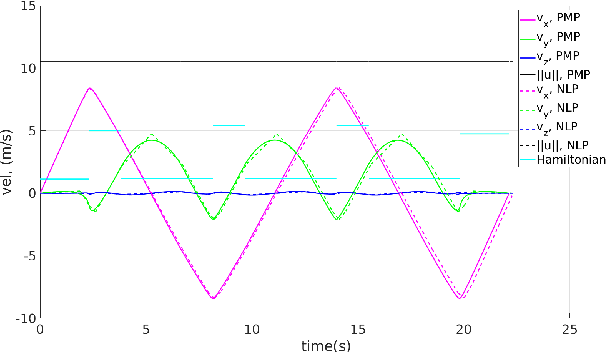
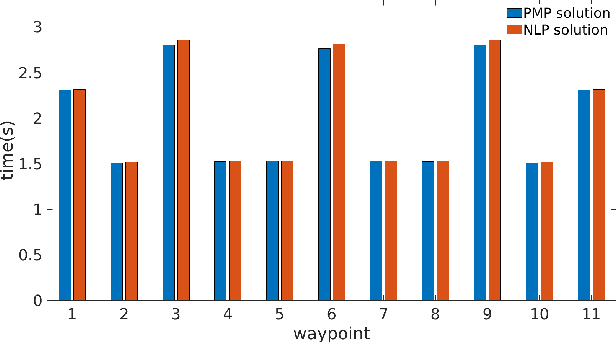
In this paper, we address a minimum-time steering problem for a drone modeled as point mass with bounded acceleration, across a set of desired waypoints in the presence of gravity. We first provide a method to solve for the minimum-time control input that will steer the point mass between two waypoints based on a continuous-time problem formulation which we address by using Pontryagin's Minimum Principle. Subsequently, we solve for the time-optimal trajectory across the given set of waypoints by discretizing in the time domain and formulating the minimum-time problem as a nonlinear program (NLP). The velocities at each waypoint obtained from solving the NLP in the discretized domain are then used as boundary conditions to extend our two-point solution across those multiple waypoints. We apply this planning methodology to execute a surveying task that minimizes the time taken to completely explore a target area or volume. Numerical simulations and theoretical analyses of this new planning methodology are presented. The results from our approach are also compared to traditional polynomial trajectories like minimum snap planning.