 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAS: A Deformable Attention to Capture Salient Information in CNNs
Nov 20, 2023

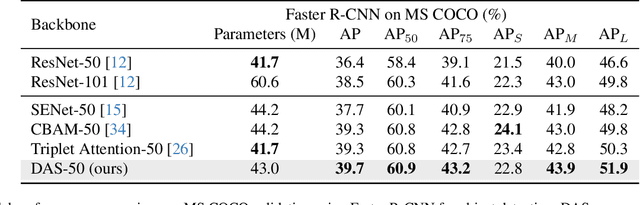

Convolutional Neural Networks (CNNs) excel in local spatial pattern recognition. For many vision tasks, such as object recognition and segmentation, salient information is also present outside CNN's kernel boundaries. However, CNNs struggle in capturing such relevant information due to their confined receptive fields. Self-attention can improve a model's access to global information but increases computational overhead. We present a fast and simple fully convolutional method called DAS that helps focus attention on relevant information. It uses deformable convolutions for the location of pertinent image regions and separable convolutions for efficiency. DAS plugs into existing CNNs and propagates relevant information using a gating mechanism. Compared to the O(n^2) computational complexity of transformer-style attention, DAS is O(n). Our claim is that DAS's ability to pay increased attention to relevant features results in performance improvements when added to popular CNNs for Image Classification and Object Detection. For example, DAS yields an improvement on Stanford Dogs (4.47%), ImageNet (1.91%), and COCO AP (3.3%) with base ResNet50 backbone. This outperforms other CNN attention mechanisms while using similar or less FLOPs. Our code will be publicly available.
ConceptFusion: Open-set Multimodal 3D Mapping
Feb 15, 2023Building 3D maps of the environment is central to robot navigation, planning, and interaction with objects in a scene. Most existing approaches that integrate semantic concepts with 3D maps largely remain confined to the closed-set setting: they can only reason about a finite set of concepts, pre-defined at training time. Further, these maps can only be queried using class labels, or in recent work, using text prompts. We address both these issues with ConceptFusion, a scene representation that is (1) fundamentally open-set, enabling reasoning beyond a closed set of concepts and (ii) inherently multimodal, enabling a diverse range of possible queries to the 3D map, from language, to images, to audio, to 3D geometry, all working in concert. ConceptFusion leverages the open-set capabilities of today's foundation models pre-trained on internet-scale data to reason about concepts across modalities such as natural language, images, and audio. We demonstrate that pixel-aligned open-set features can be fused into 3D maps via traditional SLAM and multi-view fusion approaches. This enables effective zero-shot spatial reasoning, not needing any additional training or finetuning, and retains long-tailed concepts better than supervised approaches, outperforming them by more than 40% margin on 3D IoU. We extensively evaluate ConceptFusion on a number of real-world datasets, simulated home environments, a real-world tabletop manipulation task, and an autonomous driving platform. We showcase new avenues for blending foundation models with 3D open-set multimodal mapping. For more information, visit our project page https://concept-fusion.github.io or watch our 5-minute explainer video https://www.youtube.com/watch?v=rkXgws8fiDs
NPC: Neighbors Progressive Competition Algorithm for Classification of Imbalanced Data Sets
Nov 29, 2017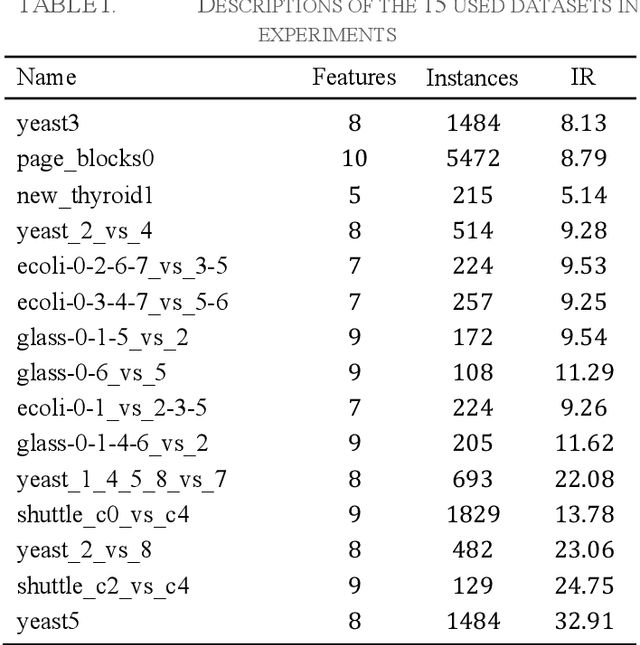
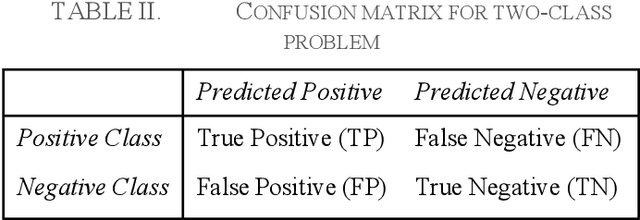
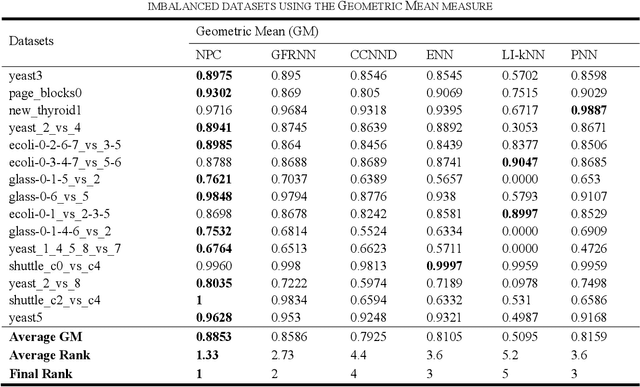

Learning from many real-world datasets is limited by a problem called the class imbalance problem. A dataset is imbalanced when one class (the majority class) has significantly more samples than the other class (the minority class). Such datasets cause typical machine learning algorithms to perform poorly on the classification task. To overcome this issue, this paper proposes a new approach Neighbors Progressive Competition (NPC) for classification of imbalanced datasets. Whilst the proposed algorithm is inspired by weighted k-Nearest Neighbor (k-NN) algorithms, it has major differences from them. Unlike k- NN, NPC does not limit its decision criteria to a preset number of nearest neighbors. In contrast, NPC considers progressively more neighbors of the query sample in its decision making until the sum of grades for one class is much higher than the other classes. Furthermore, NPC uses a novel method for grading the training samples to compensate for the imbalance issue. The grades are calculated using both local and global information. In brief, the contribution of this paper is an entirely new classifier for handling the imbalance issue effectively without any manually-set parameters or any need for expert knowledge. Experimental results compare the proposed approach with five representative algorithms applied to fifteen imbalanced datasets and illustrate this algorithms effectiveness.