 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Model for Multi-stage Censoring
Nov 18, 2025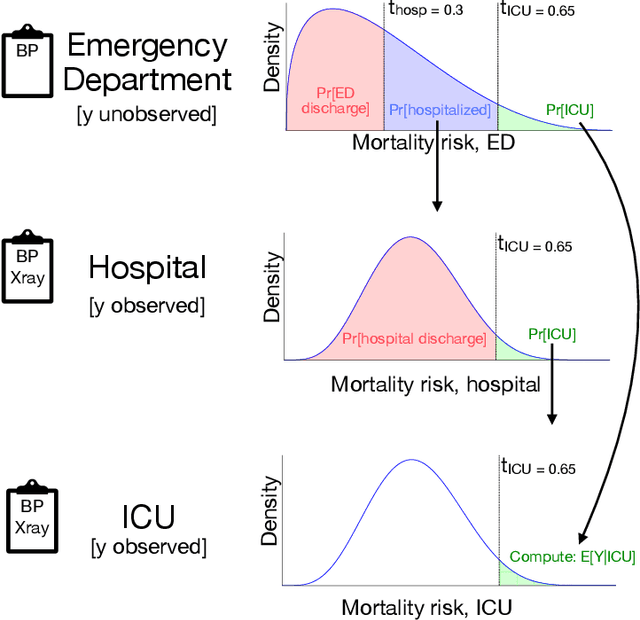
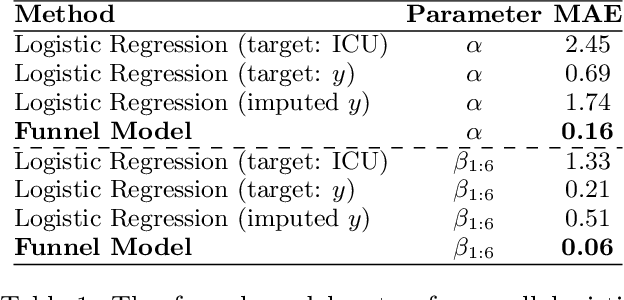
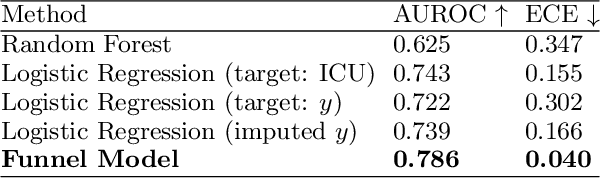
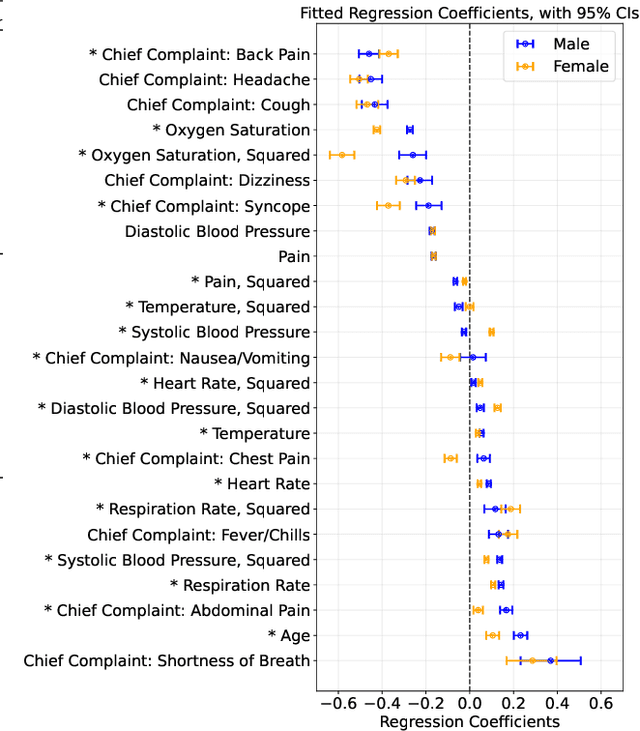
Many sequential decision settings in healthcare feature funnel structures characterized by a series of stages, such as screenings or evaluations, where the number of patients who advance to each stage progressively decreases and decisions become increasingly costly. For example, an oncologist may first conduct a breast exam, followed by a mammogram for patients with concerning exams, followed by a biopsy for patients with concerning mammograms. A key challenge is that the ground truth outcome, such as the biopsy result, is only revealed at the end of this funnel. The selective censoring of the ground truth can introduce statistical biases in risk estimation, especially in underserved patient groups, whose outcomes are more frequently censored. We develop a Bayesian model for funnel decision structures, drawing from prior work on selective labels and censoring. We first show in synthetic settings that our model is able to recover the true parameters and predict outcomes for censored patients more accurately than baselines. We then apply our model to a dataset of emergency department visits, where in-hospital mortality is observed only for those who are admitted to either the hospital or ICU. We find that there are gender-based differences in hospital and ICU admissions. In particular, our model estimates that the mortality risk threshold to admit women to the ICU is higher for women (5.1%) than for men (4.5%).
A Comprehensive Dataset of Grains for Granular Jamming in Soft Robotics: Grip Strength and Shock Absorption
Dec 13, 2022
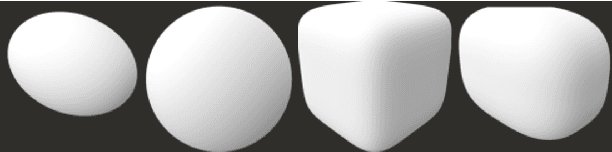
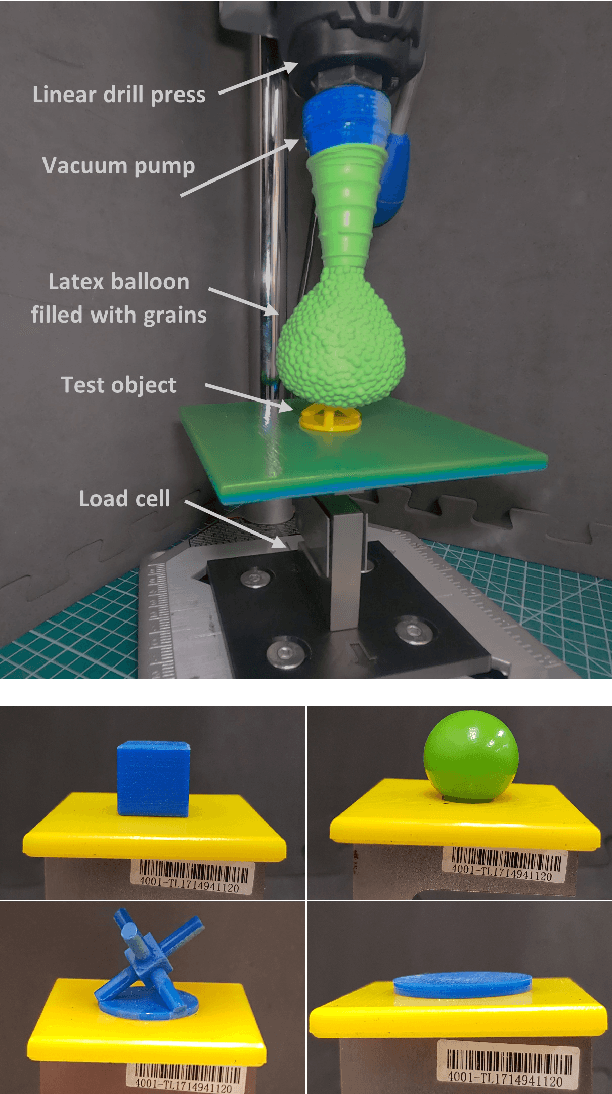
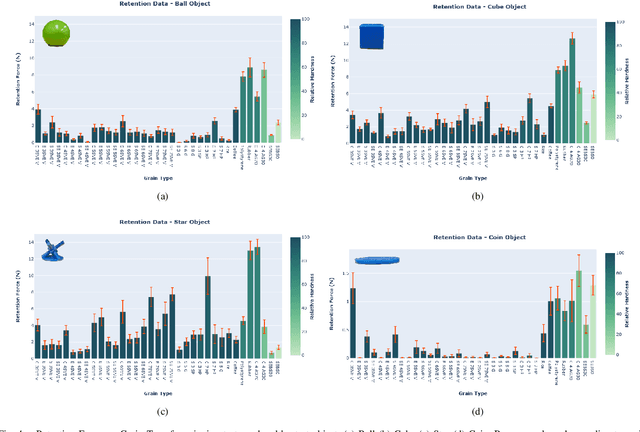
We test grip strength and shock absorption properties of various granular material in granular jamming robotic components. The granular material comprises a range of natural, manufactured, and 3D printed material encompassing a wide range of shapes, sizes, and Shore hardness. Two main experiments are considered, both representing compelling use cases for granular jamming in soft robotics. The first experiment measures grip strength (retention force measured in Newtons) when we fill a latex balloon with the chosen grain type and use it as a granular jamming gripper to pick up a range of test objects. The second experiment measures shock absorption properties recorded by an Inertial Measurement Unit which is suspended in an envelope of granular material and dropped from a set height. Our results highlight a range of shape, size and softness effects, including that grain deformability is a key determinant of grip strength, and interestingly, that larger grain sizes in 3D printed grains create better shock absorbing materials.
Getting a Grip: in Materio Evolution of Membrane Morphology for Soft Robotic Jamming Grippers
Nov 02, 2021
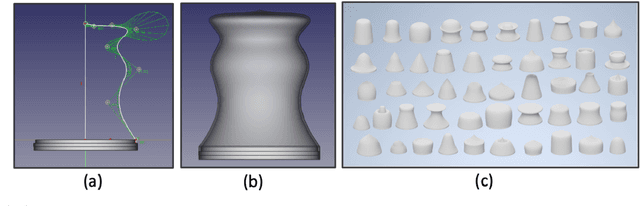
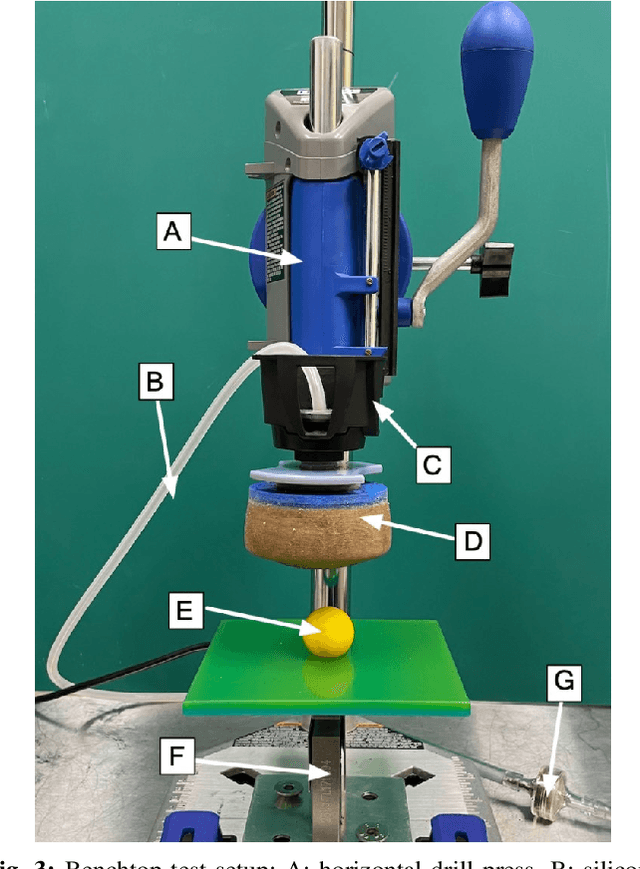
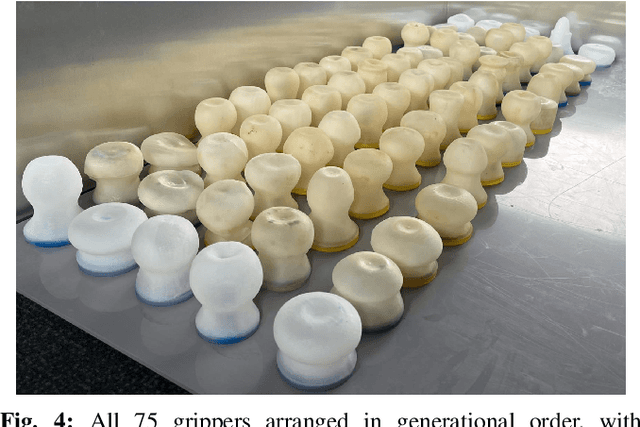
The application of granular jamming in soft robotics is a recent and promising new technology offer exciting possibilities for creating higher performance robotic devices. Granular jamming is achieved via the application of a vacuum pressure inside a membrane containing particulate matter, and is particularly interesting from a design perspective, as a myriad of design parameters can potentially be exploited to induce a diverse variety of useful behaviours. To date, the effect of variables such as grain shape and size, as well as membrane material, have been studied as a means of inducing bespoke gripping performance, however the other main contributing factor, membrane morphology, has not been studied due to its particular complexities in both accurate modelling and fabrication. This research presents the first study that optimises membrane morphology for granular jamming grippers, combining multi-material 3D printing and an evolutionary algorithm to search through a varied morphology design space in materio. Entire generations are printed in a single run and gripper retention force is tested and used as a fitness measure. Our approach is relatively scalable, circumvents the need for modelling, and guarantees the real-world performance of the grippers considered. Results show that membrane morphology is a key determinant of gripper performance. Common high performance designs are seen to optimise all three of the main identified mechanisms by which granular grippers generate grip force, are significantly different from a standard gripper morphology, and generalise well across a range of test objects.
End-to-End Interpretation of the French Street Name Signs Dataset
Feb 13, 2017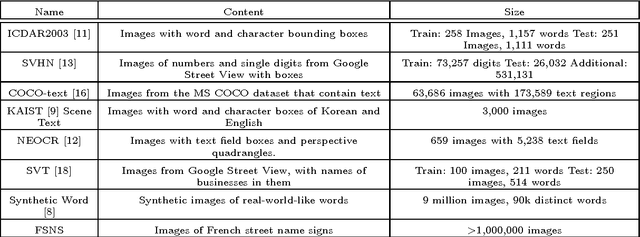


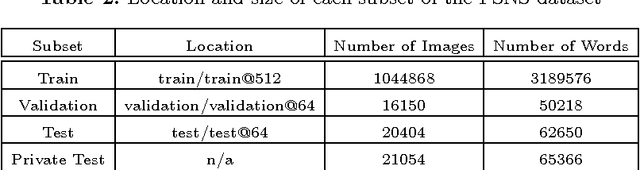
We introduce the French Street Name Signs (FSNS) Dataset consisting of more than a million images of street name signs cropped from Google Street View images of France. Each image contains several views of the same street name sign. Every image has normalized, title case folded ground-truth text as it would appear on a map. We believe that the FSNS dataset is large and complex enough to train a deep network of significant complexity to solve the street name extraction problem "end-to-end" or to explore the design trade-offs between a single complex engineered network and multiple sub-networks designed and trained to solve sub-problems. We present such an "end-to-end" network/graph for Tensor Flow and its results on the FSNS dataset.
* Presented at the IWRR workshop at ECCV 2016