 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMatched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Sep 06, 2024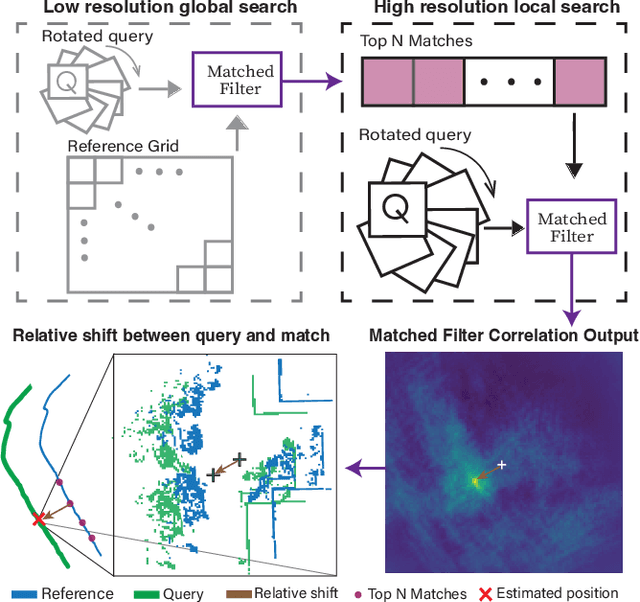
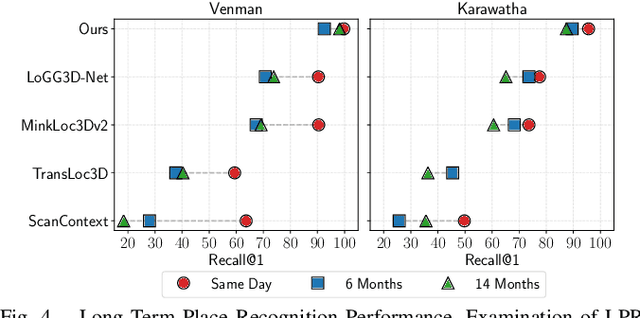
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Trajectory Tracking via Multiscale Continuous Attractor Networks
Aug 01, 2023



Animals and insects showcase remarkably robust and adept navigational abilities, up to literally circumnavigating the globe. Primary progress in robotics inspired by these natural systems has occurred in two areas: highly theoretical computational neuroscience models, and handcrafted systems like RatSLAM and NeuroSLAM. In this research, we present work bridging the gap between the two, in the form of Multiscale Continuous Attractor Networks (MCAN), that combine the multiscale parallel spatial neural networks of the previous theoretical models with the real-world robustness of the robot-targeted systems, to enable trajectory tracking over large velocity ranges. To overcome the limitations of the reliance of previous systems on hand-tuned parameters, we present a genetic algorithm-based approach for automated tuning of these networks, substantially improving their usability. To provide challenging navigational scale ranges, we open source a flexible city-scale navigation simulator that adapts to any street network, enabling high throughput experimentation. In extensive experiments using the city-scale navigation environment and Kitti, we show that the system is capable of stable dead reckoning over a wide range of velocities and environmental scales, where a single-scale approach fails.
The Jamming Donut: A Free-Space Gripper based on Granular Jamming
Dec 13, 2022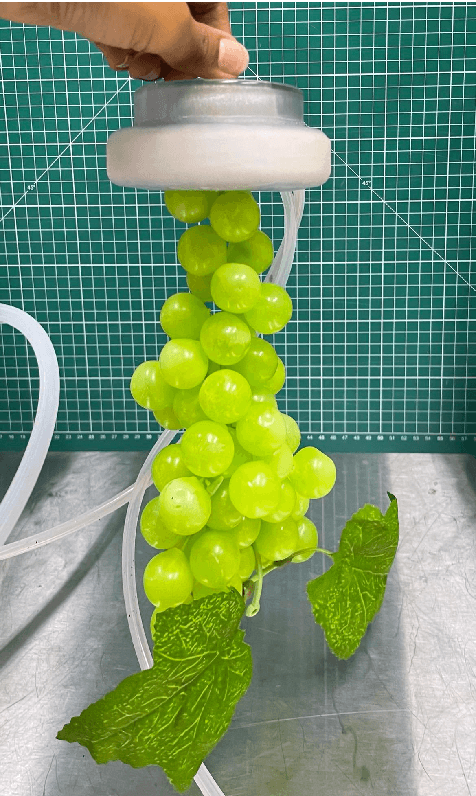
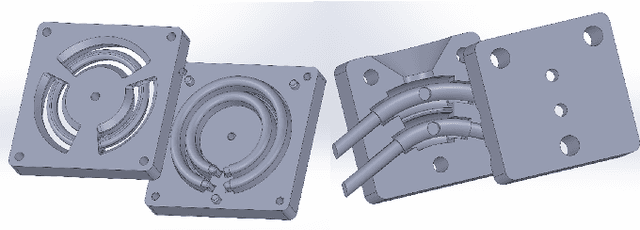
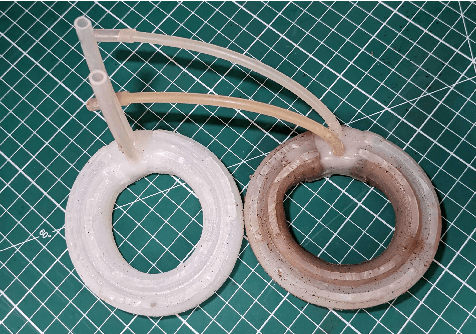
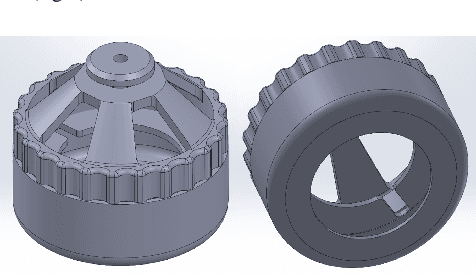
Fruit harvesting has recently experienced a shift towards soft grippers that possess compliance, adaptability, and delicacy. In this context, pneumatic grippers are popular, due to provision of high deformability and compliance, however they typically possess limited grip strength. Jamming possesses strong grip capability, however has limited deformability and often requires the object to be pushed onto a surface to attain a grip. This paper describes a hybrid gripper combining pneumatics (for deformation) and jamming (for grip strength). Our gripper utilises a torus (donut) structure with two chambers controlled by pneumatic and vacuum pressure respectively, to conform around a target object. The gripper displays good adaptability, exploiting pneumatics to mould to the shape of the target object where jamming can be successfully harnessed to grip. The main contribution of the paper is design, fabrication, and characterisation of the first hybrid gripper that can use granular jamming in free space, achieving significantly larger retention forces compared to pure pneumatics. We test our gripper on a range of different sizes and shapes, as well as picking a broad range of real fruit.
A Comprehensive Dataset of Grains for Granular Jamming in Soft Robotics: Grip Strength and Shock Absorption
Dec 13, 2022
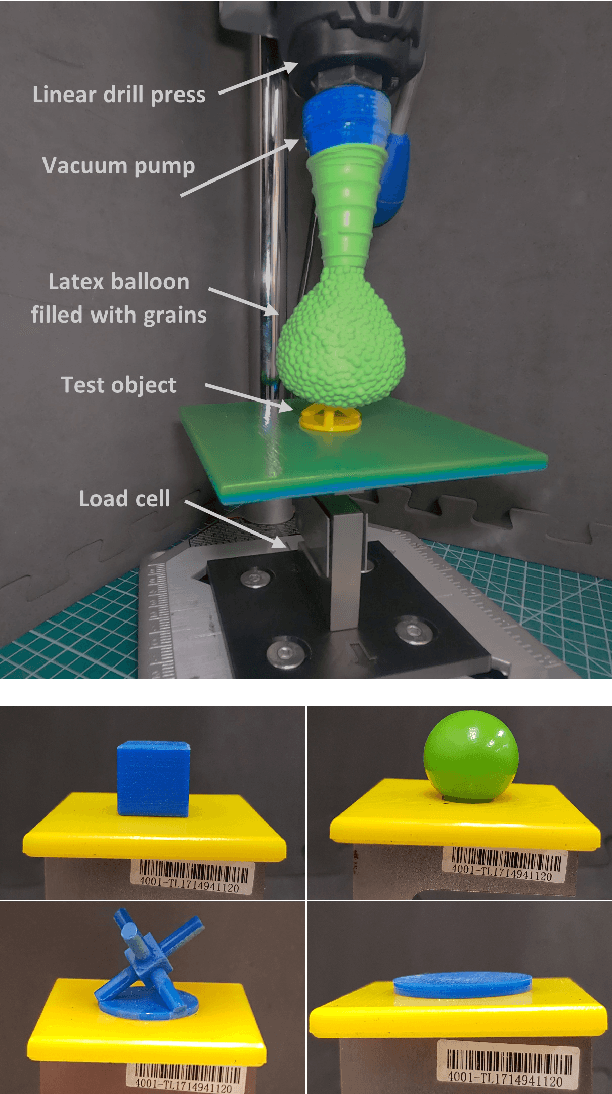
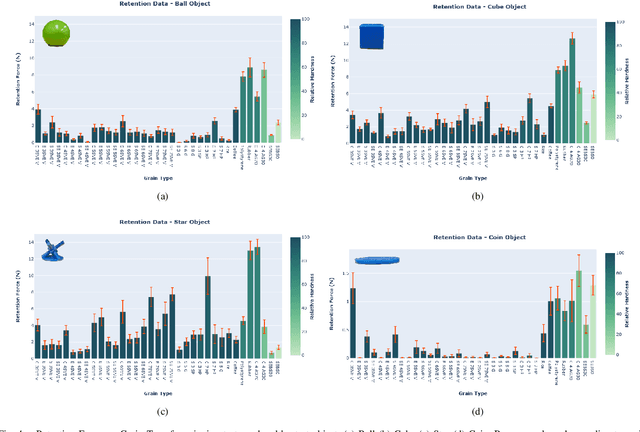
We test grip strength and shock absorption properties of various granular material in granular jamming robotic components. The granular material comprises a range of natural, manufactured, and 3D printed material encompassing a wide range of shapes, sizes, and Shore hardness. Two main experiments are considered, both representing compelling use cases for granular jamming in soft robotics. The first experiment measures grip strength (retention force measured in Newtons) when we fill a latex balloon with the chosen grain type and use it as a granular jamming gripper to pick up a range of test objects. The second experiment measures shock absorption properties recorded by an Inertial Measurement Unit which is suspended in an envelope of granular material and dropped from a set height. Our results highlight a range of shape, size and softness effects, including that grain deformability is a key determinant of grip strength, and interestingly, that larger grain sizes in 3D printed grains create better shock absorbing materials.
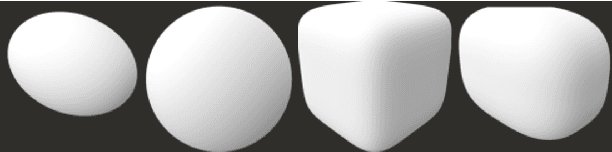
Getting a Grip: in Materio Evolution of Membrane Morphology for Soft Robotic Jamming Grippers
Nov 02, 2021
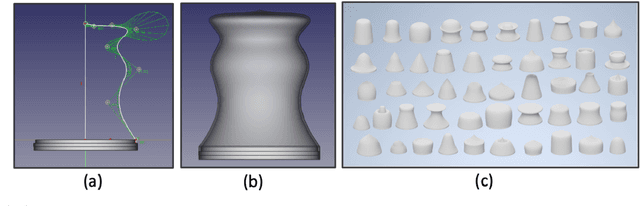
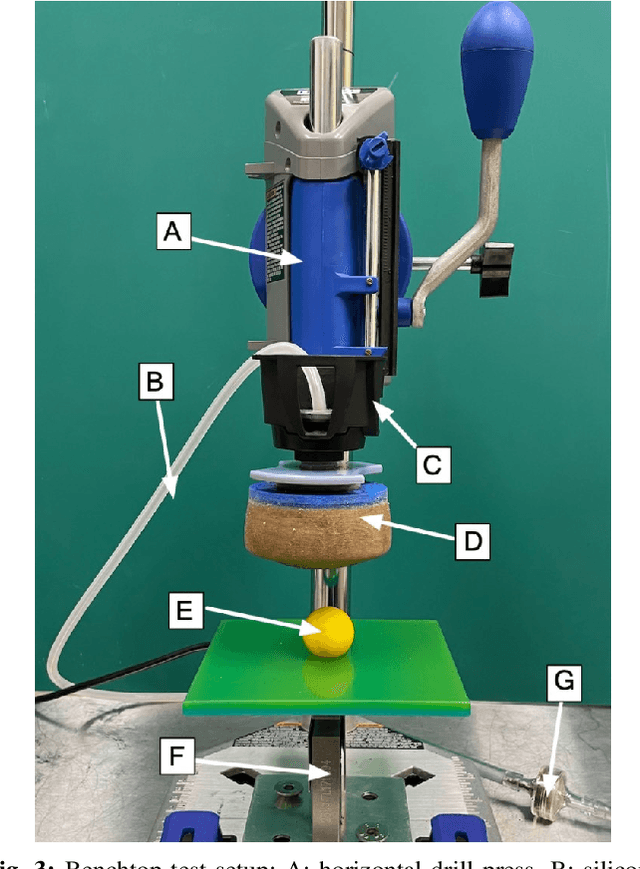
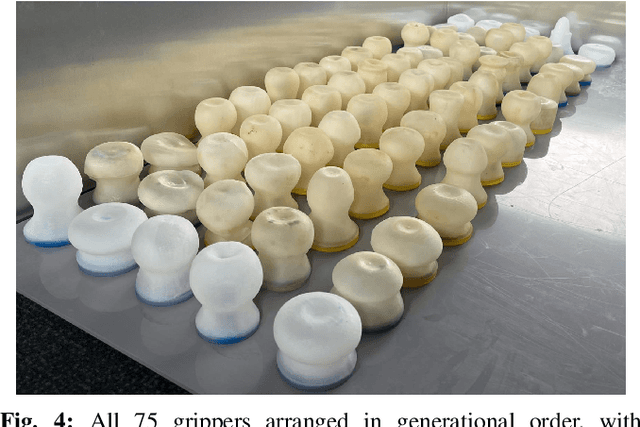
The application of granular jamming in soft robotics is a recent and promising new technology offer exciting possibilities for creating higher performance robotic devices. Granular jamming is achieved via the application of a vacuum pressure inside a membrane containing particulate matter, and is particularly interesting from a design perspective, as a myriad of design parameters can potentially be exploited to induce a diverse variety of useful behaviours. To date, the effect of variables such as grain shape and size, as well as membrane material, have been studied as a means of inducing bespoke gripping performance, however the other main contributing factor, membrane morphology, has not been studied due to its particular complexities in both accurate modelling and fabrication. This research presents the first study that optimises membrane morphology for granular jamming grippers, combining multi-material 3D printing and an evolutionary algorithm to search through a varied morphology design space in materio. Entire generations are printed in a single run and gripper retention force is tested and used as a fitness measure. Our approach is relatively scalable, circumvents the need for modelling, and guarantees the real-world performance of the grippers considered. Results show that membrane morphology is a key determinant of gripper performance. Common high performance designs are seen to optimise all three of the main identified mechanisms by which granular grippers generate grip force, are significantly different from a standard gripper morphology, and generalise well across a range of test objects.