 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Jamming Donut: A Free-Space Gripper based on Granular Jamming
Paper and Code
Dec 13, 2022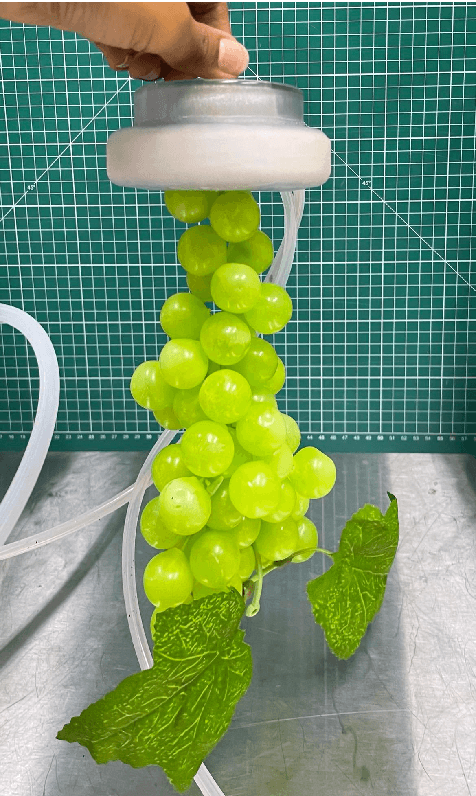
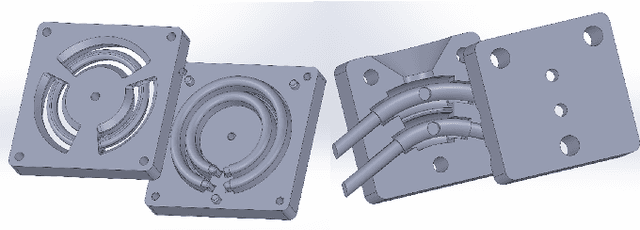
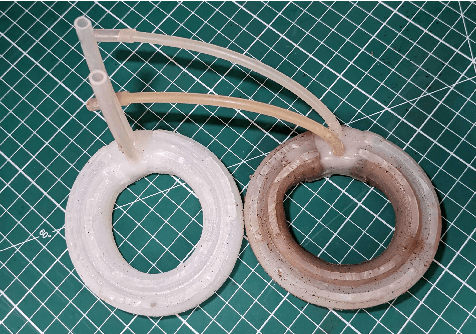
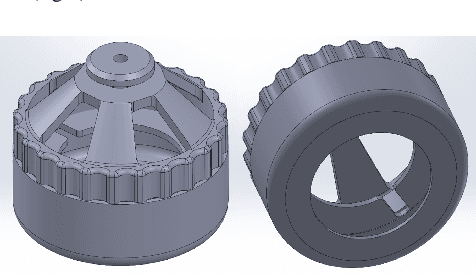
Fruit harvesting has recently experienced a shift towards soft grippers that possess compliance, adaptability, and delicacy. In this context, pneumatic grippers are popular, due to provision of high deformability and compliance, however they typically possess limited grip strength. Jamming possesses strong grip capability, however has limited deformability and often requires the object to be pushed onto a surface to attain a grip. This paper describes a hybrid gripper combining pneumatics (for deformation) and jamming (for grip strength). Our gripper utilises a torus (donut) structure with two chambers controlled by pneumatic and vacuum pressure respectively, to conform around a target object. The gripper displays good adaptability, exploiting pneumatics to mould to the shape of the target object where jamming can be successfully harnessed to grip. The main contribution of the paper is design, fabrication, and characterisation of the first hybrid gripper that can use granular jamming in free space, achieving significantly larger retention forces compared to pure pneumatics. We test our gripper on a range of different sizes and shapes, as well as picking a broad range of real fruit.