 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReefFlex: A Generative Design Framework for Soft Robotic Grasping of Organic and Fragile objects
Feb 09, 2026Climate change, invasive species and human activities are currently damaging the world's coral reefs at unprecedented rates, threatening their vast biodiversity and fisheries, and reducing coastal protection. Solving this vast challenge requires scalable coral regeneration technologies that can breed climate-resilient species and accelerate the natural regrowth processes; actions that are impeded by the absence of safe and robust tools to handle the fragile coral. We investigate ReefFlex, a generative soft finger design methodology that explores a diverse space of soft fingers to produce a set of candidates capable of safely grasping fragile and geometrically heterogeneous coral in a cluttered environment. Our key insight is encoding heterogeneous grasping into a reduced set of motion primitives, creating a simplified, tractable multi-objective optimisation problem. To evaluate the method, we design a soft robot for reef rehabilitation, which grows and manipulates coral in onshore aquaculture facilities for future reef out-planting. We demonstrate ReefFlex increases both grasp success and grasp quality (disturbance resistance, positioning accuracy) and reduces in adverse events encountered during coral manipulation compared to reference designs. ReefFlex, offers a generalisable method to design soft end-effectors for complex handling and paves a pathway towards automation in previously unachievable domains like coral handling for restoration.
The Jamming Donut: A Free-Space Gripper based on Granular Jamming
Dec 13, 2022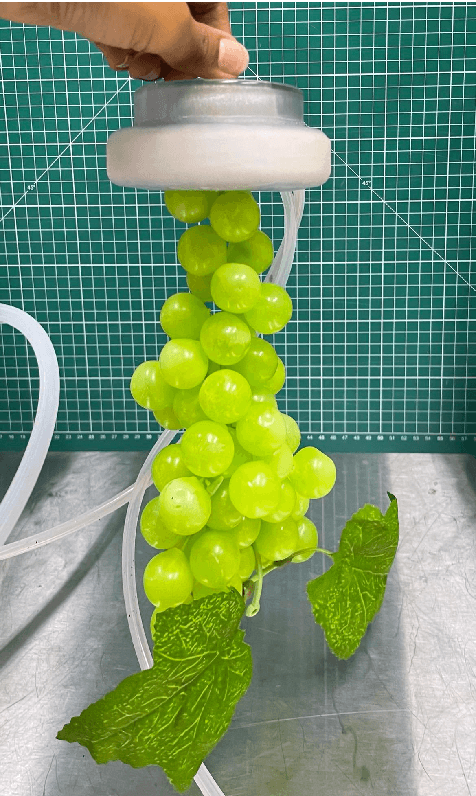
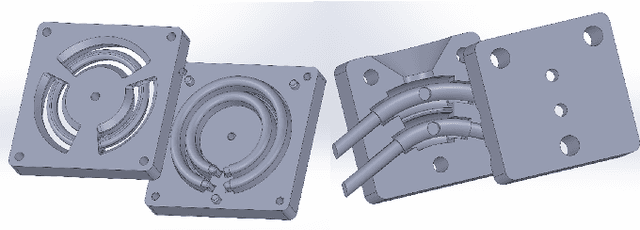
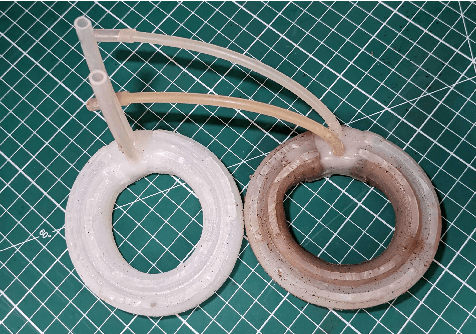
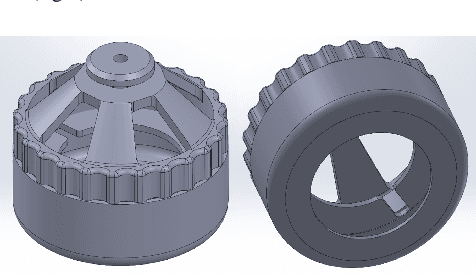
Fruit harvesting has recently experienced a shift towards soft grippers that possess compliance, adaptability, and delicacy. In this context, pneumatic grippers are popular, due to provision of high deformability and compliance, however they typically possess limited grip strength. Jamming possesses strong grip capability, however has limited deformability and often requires the object to be pushed onto a surface to attain a grip. This paper describes a hybrid gripper combining pneumatics (for deformation) and jamming (for grip strength). Our gripper utilises a torus (donut) structure with two chambers controlled by pneumatic and vacuum pressure respectively, to conform around a target object. The gripper displays good adaptability, exploiting pneumatics to mould to the shape of the target object where jamming can be successfully harnessed to grip. The main contribution of the paper is design, fabrication, and characterisation of the first hybrid gripper that can use granular jamming in free space, achieving significantly larger retention forces compared to pure pneumatics. We test our gripper on a range of different sizes and shapes, as well as picking a broad range of real fruit.
A Comprehensive Dataset of Grains for Granular Jamming in Soft Robotics: Grip Strength and Shock Absorption
Dec 13, 2022
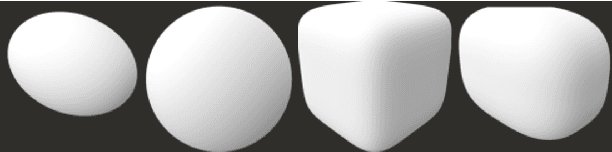
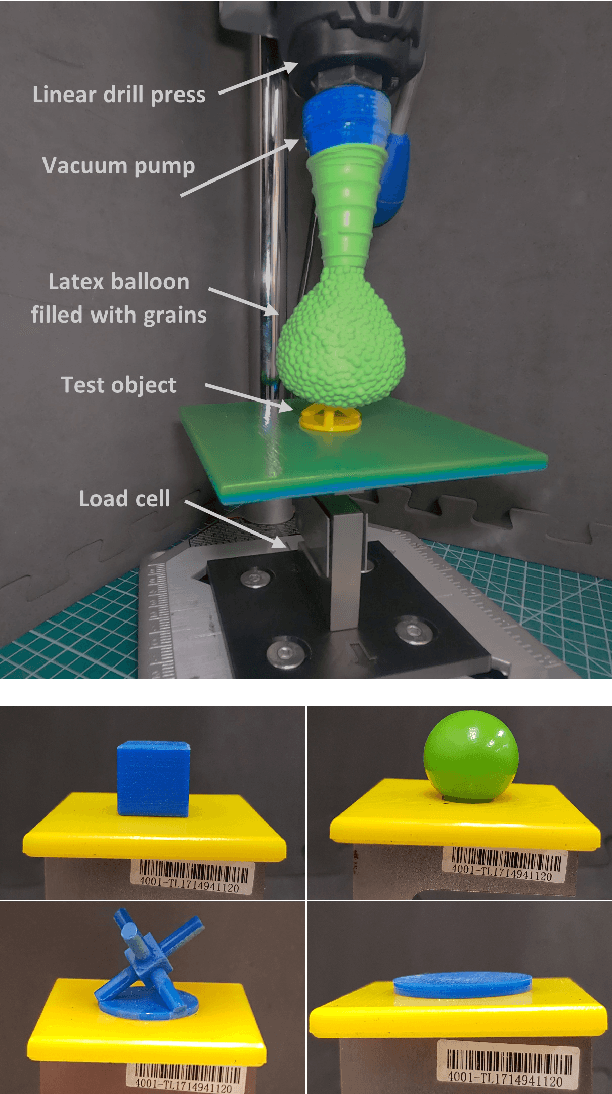
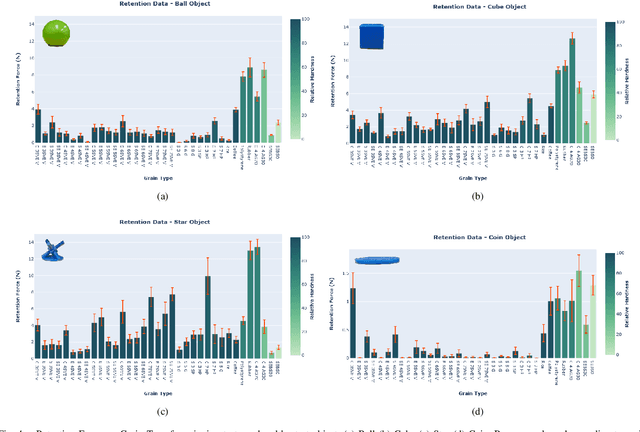
We test grip strength and shock absorption properties of various granular material in granular jamming robotic components. The granular material comprises a range of natural, manufactured, and 3D printed material encompassing a wide range of shapes, sizes, and Shore hardness. Two main experiments are considered, both representing compelling use cases for granular jamming in soft robotics. The first experiment measures grip strength (retention force measured in Newtons) when we fill a latex balloon with the chosen grain type and use it as a granular jamming gripper to pick up a range of test objects. The second experiment measures shock absorption properties recorded by an Inertial Measurement Unit which is suspended in an envelope of granular material and dropped from a set height. Our results highlight a range of shape, size and softness effects, including that grain deformability is a key determinant of grip strength, and interestingly, that larger grain sizes in 3D printed grains create better shock absorbing materials.