 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera-Pose Robust Crater Detection from Chang'e 5
Jun 07, 2024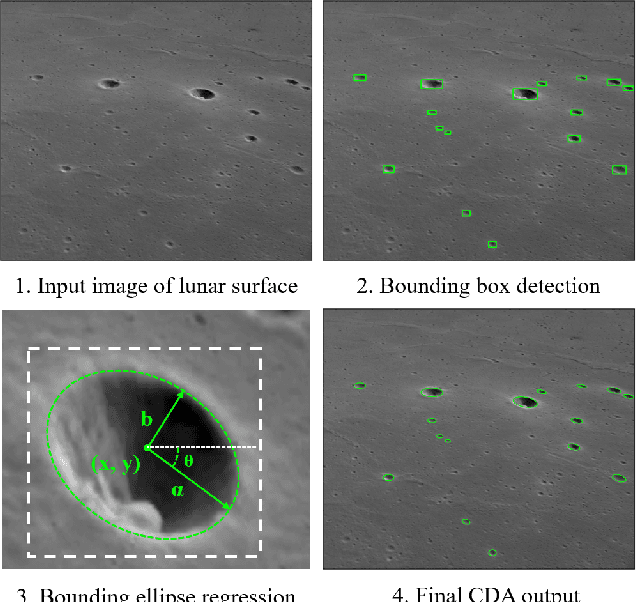


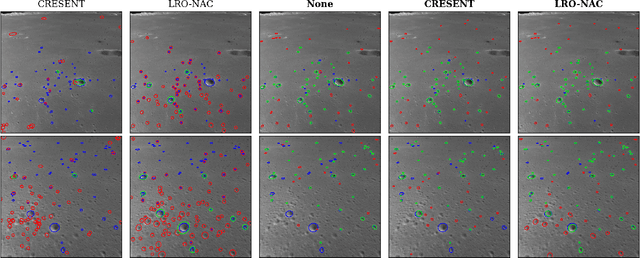
As space missions aim to explore increasingly hazardous terrain, accurate and timely position estimates are required to ensure safe navigation. Vision-based navigation achieves this goal through correlating impact craters visible through onboard imagery with a known database to estimate a craft's pose. However, existing literature has not sufficiently evaluated crater-detection algorithm (CDA) performance from imagery containing off-nadir view angles. In this work, we evaluate the performance of Mask R-CNN for crater detection, comparing models pretrained on simulated data containing off-nadir view angles and to pretraining on real-lunar images. We demonstrate pretraining on real-lunar images is superior despite the lack of images containing off-nadir view angles, achieving detection performance of 63.1 F1-score and ellipse-regression performance of 0.701 intersection over union. This work provides the first quantitative analysis of performance of CDAs on images containing off-nadir view angles. Towards the development of increasingly robust CDAs, we additionally provide the first annotated CDA dataset with off-nadir view angles from the Chang'e 5 Landing Camera.
Globally Optimal Event-Based Divergence Estimation for Ventral Landing
Sep 27, 2022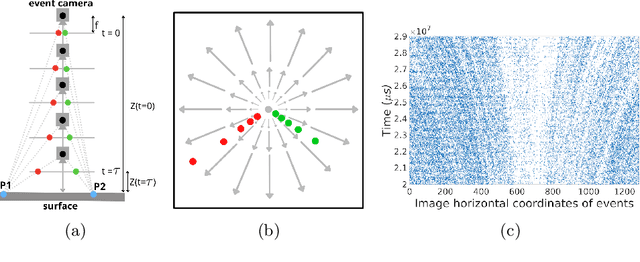
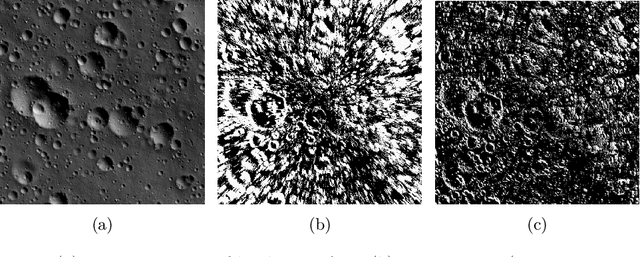
Event sensing is a major component in bio-inspired flight guidance and control systems. We explore the usage of event cameras for predicting time-to-contact (TTC) with the surface during ventral landing. This is achieved by estimating divergence (inverse TTC), which is the rate of radial optic flow, from the event stream generated during landing. Our core contributions are a novel contrast maximisation formulation for event-based divergence estimation, and a branch-and-bound algorithm to exactly maximise contrast and find the optimal divergence value. GPU acceleration is conducted to speed up the global algorithm. Another contribution is a new dataset containing real event streams from ventral landing that was employed to test and benchmark our method. Owing to global optimisation, our algorithm is much more capable at recovering the true divergence, compared to other heuristic divergence estimators or event-based optic flow methods. With GPU acceleration, our method also achieves competitive runtimes.